1
UNIVERSIDAD NACIONAL DEL CALLAO
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
INSTITUTO DE INVESTIGACIÓN DE LA FACULTAD DE INGENIERÍA
ELÉCTRICA Y ELECTRÓNICA
R
E
e
UNIVERSIDAD NACIONAL DEL CALLAO
VICt;.l!t'r~M~:'"l IJE INVESTIGACIÓN
S?'1
~·
1
15 ENE 2015
r}S·Df
. . . . . . . . . . . . l~
. . ······--
o.
H!Jt<A.: ......
o
FIRMA: ....................................................
INFORME FINAL DEL TEXTO
"TEXTO: ELECTRÓNICA DE POTENCIA: DISEÑO Y
SIMULACIÓN DE CIRCUITOS ELECTRÓNICOS DE
POTENCIA"
AUTOR: ING. RUSSELL CÓRDOVA RUIZ
(PERIODO DE EJECUCIÓN: Del 01 de Octubre del2013 al 30 de Setiembre
del2014)
(RESOLUCIÓN DE APROBACIÓN: R.R. N° 916-2013-R)
Callao, año 2014
DEDICATORIA
A Dios, que su presencia y su poder sean mi
alimento.
A mi Padre, Madre, In memoria; por su
constante presencia espiritual, quienes por
su temprana partida, nunca pudieron ver,
mis objetivos alcanzados.
AGRADECIMIENTO
Mi
agradecimiento
a
las
personas
que
hicieron posible el desarrollo del texto, unas
están presentes, otras en mis recuerdos y en
mi corazón, sin interesar donde estén.
Para ellos; muchas bendiciones.
INbiCE GENERAL
Pág.
l.
INDICE
1
1.1 TABLA DE CONTENIDO
3
1.2 ÍNDICE DE FIGURAS
4
11.
PRÓLOGO
11
111.
INTRODUCCIÓN
12
IV.
CONTENIDO
14
CAPÍTULO 1. INTRODUCCIÓN AL MODELADO, ANÁLISIS Y
14
SIMULACIÓN DE CIRCUITOS ELECTRÓNICOS DE POTENCIA
CIRCUITOS ELECTRÓNICOS DE POTENCIA
16
CAPÍTULO 2. DIODOS DE POTENCIA Y SIMULACIÓN
2.1 INTRODUCCIÓN
16
2.2 MODELOS ESTÁTICOS DEL DIODO
18
2.3 SIMULACIÓN EN AC EN FUNCIÓN DEL TIEMPO
18
CAPÍTULO
3.
CIRCUITOS
RECTIFICADORES
MONTAJES Y
20
SIMULACIÓN
3.1 CIRCUITOS RECTIFICADORES
20
3.2 DISEÑO Y VERIFICACIÓN DE UN RECTIFICADOR
38
MONOFÁSICO DE MEDIA ONDA NO CONTROLADA CON
CARGAR, RL
CAPÍTULO 4. EL TIRISTOR, TRIAC, ELEMENTOS DE DISPARO
55
4.1 INTRODUCCIÓN
55
4.2 FORMAS DE ACTIVAR UN TIRISTOR
56
4.3 EL TRIAC
58
4.4 DISPOSITIVOS DE DISPAROS DEL TIRISTOR
61
CAPÍTULO 5. RECTIFICADORES CONTROLADOS, CON CARGA
65
:R, RL RLE, SIMULACIÓN
5.1 RECTIFICADOR MONOFÁSICO SEMICONTROLADO
65
5.2 MARCO TEÓRICO
65
5.3 RECTIFICACIÓN SEMICONTROLADO
65
5.4 CIRCUITO DE DISPARO DISEÑO EN MULTISIM
68
CAPÍTULO 6. TRANSISTORES DE POTENCIA
71
6.1 INTRODUCCIÓN
71
6.2 PRINCIPIOS BÁSICOS DE FUNCIONAMIENTO
74
6.3 MODOS DE TRABAJO DEL TRANSISTOR BIPOLAR
77
d?
1
6.4 PRINCIPIOS BÁSICOS DE FUNCIONAMIENTO
78
6.5 AVALANCHA SECUNDARIA: CURVAS SOA
78
CAPÍTULO ?.INVERSORES U ONDULADORES, MONOFÁSICOS Y
91
TRIFÁSICOS, SIMULACIÓN
7.1 INTRODUCCIÓN
91
7.21NVERSOR EN PUENTE COMPLETO
92
7.3 INVERSORES TRIFÁSICOS
93
CAPÍTULO 8. INVERSORES PWM, INVERSORES RESONANTES,
100
SIMULACIÓN
8.1 INVERSORES MODULADOS
CAPÍTULO 9. INTERRUPTORES ESTÁTICOS
100
105
9.1 INTRODUCCIÓN
105
9.2 CLSIFICACION DE LOS INTERRUPTORES ESTATICOS
105
9.3 INTERRUPTORES ESTATICOS DE C.C.
106
CAPÍTULO 10.FUENTES DE PODER DC-AC
124
10.1 FUENTE DE PODER CON SCR, ACE, DC
124
10.2 FUENTE DE PODER DE TENSIÓN VARIABLE DE 5-15V,
124
PROTEGIDA CON SCR
10.3 FUENTE CON SCR
126
10.4 FUENTE DE ALIMENTACIÓN DE 2 SALIDAS
127
CAPÍTULO 11. PROPULSORES DE AC.
11.1 INTRODUCCIÓN
CAPÍTULO 12. PROTECCIÓN DE DISPOSITIVOS Y CIRCUITOS
140
140
142
12.1 INTRODUCCIÓN
142
12.2 EL FUSIBLE
142
12.3 EL VARISTOR
144
12.4 DIODO ZENER Y DE AVALANCHA
146
12.5 ELEMENTO DE PROTECCIÓN CON DIODO ZENER
147
12.6 CIRCUITO DETECTOR DE SOBRE CORRIENTE (OCP)
148
12.7 CIRCUITO DETECTOR DE SOBRE VOLTAJE (OVP)
149
12.8 PROTECCIÓN CONTRA VOLTAJE (UVP)
151
V.
REFERENCIALES
159
VI.
APÉNDICES
160
VIl.
ANEXOS
169
2
TABLAS DE CONTENIDO
INDICE DE TABLAS
Pág.
TABLA No 1 PARAMETROS DE LOS TRANSISTORES DE POTENCIA
TABLA No 2 COMPONENTES DE LA FUENTE DE PODER DC- AC
73
126
~··
3
INDICE DE FIGURAS
Pág.
FIGURA No 2.1 Curva característica del diodo
16
FIGURA No 2.2 Modelos estáticos del diodo
18
FIGURA No 2.3 Rectificador de media onda no controlado
18
FIGURA No 2.4 Rectificador de onda completa no controlado
19
FIGURA No 3.1 Rectificador de media onda
20
FIGURA No 3.2 Rectificador de Onda completa con derivación central y
20
tipo puente
FIGURA No 3.3 Rectificador de onda completa con derivación central y
22
puente completo
FIGURA No 3.4 Rectificador de media Onda
23
FIGURA No 3.5 Rectificador de Onda completa
23
FIGURA No 3.6 Forma de Onda del Rectificador de onda completa
23
FIGURA No 3. 7 Rectificador derivación central con carga RC
24
FIGURA No 3.8 Rectificador de onda completa con carga RC
25
FIGURA. No 3.9 Forma de onda de entrada y salida con carga RC
25
FIGURA No 3.1 O Formas de Onda al aumentar C=1 OuF
26
FIGURA No 3.11 Forma de onda al aumentar C= 1OOuF
26
FIGURA No 3.12 Carga y descarga de un condensador
27
FIGURA No 3.13 Circuito rectificador de onda completa con regulador
28
de voltaje
FIGURA No 3.14 Circuito rectificador de onda completa con regulador
30
Zener
FIGURA No 3.15 Formas de onda de entrada y salida del circuito
30
regulador
FIGURA No 3.16 Rectificador de media onda carga RC
31
FIGURA No 3.17 Circuito rectificador de media onda, carga R
32
FIGURA No 3.18 Circuito a la salida con R
32
FIGURA No 3.19 Rectificador de media onda con carga R
33
FIGURA No 3.20 Forma de onda de entrada y salida del rectificador de
34
media onda carga R
FIGURA No 3.21 Curva de transferencia entrada vs salida
34
FIGURA No 3.22 Rectificador de onda completa salida complementaria
35
?4
FIGURA No 3.23 Circuito para simular el rectificador de onda completa
36
FIGURA No 3.24 Medición a la salida del rectificador de onda completa
36
FIGURA No 3.25 Formas de onda a la entrada y salida del rectificador
36
de onda completa
FIGURA No 3.26 Medición en la salida complementaria del rectificador
37
de onda completa
FIGURA No 3.27 Rectificador de media onda carga RL
39
FIGURA No 3.28 Conexionado de los dispositivos para el rectificador de
39
media onda con carga RL
FIGURA No 3.29 Forma de onda a la entrada
40
FIGURA No 3.30 Formas de onda a la salida
40
FIGURA No 3.31 Rectificador de media onda con cargaR
41
FIGURA No 3.32 Formas de onda a la entrada y salida del rectificador
41
de media onda
FIGURA
No 3.33 Tensión
y
corriente
en
el
secundario
del
42
FIGURA No 3.34 Forma de onda del rectificador con carga RL de la
42
transformador
tensión y corriente
FIGURA No 3.35 Circuito rectificador de media onda con diodo volante
43
FIGURA No 3.36 Formas de onda para medir la tensión inversa en el
43
diodo
FIGURA No 3.37 Medición de la tensión pico
44
FIGURA No 3.38 Medición en el secundario del transformador, tensión
44
pico y eficaz
FIGURA No 3.39 Puntos de medición en el rectificador de media onda
46
carga RL con diodo volante
FIGURA No 3.40 Tensión en los bornes de la bobina
47
FIGURA No 3.41 Forma de onda en la bobina
47
FIGURA No 3.42 Corriente por el diodo rectificador
47
FIGURA No 3.43 Tensión ánodo cátodo del diodo rectificador
48
FIGURA No 3.44 Medición del Angula de extinción
48
FIGURA No 3.45 Rectificador de media onda con carga RL
49
FIGURA No 3.46 Formas de onda, rectific. de media onda con carga RL
49
S
FIGURA No 3.47 Formas de onda en el rectificador de media onda con
51
carga RL
FIGURA No 3.48 Formas de onda a la salida con diodo volante y carga
52
RL
FIGURA No 3.49 Medición del valor pico
53
FIGURA No 3.50 Forma de onda de la corriente y la tensión en la salida
53
FIGURA No 3.51 Corriente por el rectificador y diodo volante y corriente
54
por la carga
FIGURA No 4.1 Símbolo y estructura interna del tiristor
55
FIGURA No 4.2 Símbolo del triac
58
FIGURA No 4.3 Forma física del triac
58
FIGURA No 4.4 Forma equivalente del Triac con 2 Scr's
59
FIGURA No 4.5 Circuito básico de disparo del Triac.
60
FIGURA No 4.6 Formas de onda en la carga para ángulos de disparo de
61
30° y 120°
FIGURA No 4. 7 Circuito regulador de potencia, basado en un SCR
62
FIGURA No 5.1 Rectificador semicontrolado
66
FIGURA No 5.2 Formas de onda a la entrada y salida del rectificador
66
semicontrolado
FIGURA No 5.3 BJT (NPN)
66
FIGURA No 5.4 10 Resistencias de% W
66
FIGURA No 5.5 Generador de Audio
67
FIGURA No 5.6 Osciloscopio
67
FIGURA No 5. 7 2 Fuentes DC regulables O- 15 V
67
FIGURA No 5.8 Cables delgados
67
FIGURA No 5.9 Multímetro
67
FIGURA No 5.1 O Protoboards
67
FIGURA No 5.11 Salidas g1 y g2 para el disparo
68
FIGURA No 5.12 Formas de onda del circuito de disparo
68
FIGURA No 5.13 Circuito rectificador semicontrolado con carla RL
69
FIGURA No 5.14 Circuito completo del rectificador semicontrolado
70
FIGURA No 5.15
70
Formas de onda en la salida del rectificador
semicontrolado
6
FIGURA No 6.1 Algunos transistores de potencia
72
FIGURA No 6.2 Tiempo de conmutación del BJT
74
FIGURA No 6.3 Tiempo de excitación, retardo y subida
75
FIGURA No 6.4 Parámetros importantes en un señal
76
FIGURA No 6.5 Modos de trabajo del transistor Bipolar
77
FIGURA No 6.6 Curvas SOA
78
FIGURA No 6. 7 Área de funcionamiento seguro
79
FIGURA No 6.8 Circuito con carga inductiva
80
FIGURA N°6.9 Característica de transferencia para el transistor en
80
conmutación con carga inductiva
FIGURA No 6.1 O Circuitos de protección al BJT
80
FIGURA No 6.11 Efecto producido por la red snubber
81
FIGURA No 6.12 Tiempos de conmutación, para una carga resistiva
82
FIGURA No 6.13 Tiempos de conmutación, para una carga inductiva.
84
FIGURA No 6.14 Señal de base modificada
85
FIGURA No 6.15 Circuito con BJT como conmutador
86
FIGURA No 6.16 Señal aplicada a la base
86
FIGURA No 6.17 Circuito antisaturación para el BJT
88
FIGURA No 6.18 Simbología IGBT
89
FIGURA No 6.19 Circuito de aplicación con BJT
89
FIGURA No 6.20 Fuente de alimentación simétrica regulada y variable
90
FIGURA No 7.1 Inversor en puente completo
92
FIGURA No 7.2 Inversor trifásico con inversores monofásicos
93
FIGURA No 7.3 Forma de onda de salida del inversor trifásico
96
FIGURA No 7.4 Pulsos de disparo y tensión de salida
99
FIGURA No 8.1 Forma de onda de salida del inversor PWM
100
FIGURA No 8.2 Formas de ondas de funcionamiento unipolar
101
FIGURA No 8.3. Diseño del control PWM sinusoidal unipolar
102
FIGURA No 8.4 Circuito completo: Diseño unipolar
102
FIGURA No 8.5. Forma de Onda: Circuito de diseño unipolar
103
FIGURA No 8.6. Diseño del control PWM sinusoidal bipolar
103
FIGURA No 8.7 Circuito completo: Diseño bipolar
104
FIGURA No 8.8. Forma de Onda: Circuito de diseño bipolar
104
7
FIGURA No 9:1 Interrupción de conmutación forzada por condensador
107
en paralelo
FIGURA No 9.2: Formas de ondas de los SCR
108
FIGURA No 9.3 Interruptor con un transistor NPN
109
FIGURA No 9.1 Interruptor con un SCRC
11 O
FIGURA No 9.5 Interruptor con un SCR y un ejemplo de descebado
11 O
FIGURA No 9.6 interruptor con un GTO
111
FIGURA No 9. 7 interruptor con un transistor MOSFET (Canal - N)
111
FIGURA No 9.8 Interruptor de CA con tiristores (Derecha: Con cátodo
112
común)
FIGURA No 9.9 Formas de Ondas de disparo
112
FIGURA No 9.1 O Interruptor de CA con tiristor
113
FIGURA No 9.11 Interruptor de CA con tiristor y 4 diodos
113
FIGURA No 9.12 Interruptor de ca monofasico con tiristor
114
FIGURA No 9.13 Circuito Interruptor de CA trifásico con tiristor
114
FIGURA No 9.14 Formas de onda Interruptor de CA trifásico con tiristor
115
FIGURA No 9.15 Interruptor de CA trifásica con diodo y tiristor
115
FIGURA No 9.16 Interruptor reversible de CA trifásica con tiristor
116
FIGURA No 9.17 Interruptor monofásico para transferencia de canal
116
FIGURA No 9.18 Interruptor trifásico para transferencia de canal
117
FIGURA No 9.19 Esquema simplificado para un SVC
118
FIGURA No 9.20 Configuración de un TSC
118
FIGURA No 9.21 Configuración de un TCR
119
FIGURA No 9.22 Esquema de Interruptor Estático con SCR
120
FIGURA No 9.23 Disparo con un pulso a Gate.
120
FIGURA No 9.24 Disparo con un pulso al transistor
121
FIGURA No 9.25 Control de un motor PAP bipolar mediante SCRs
122
FIGURA No 9.26 Circuito realizado con Software Eagle
122
FIGURA No 9.27 Interruptor inteligente de potencia
123
FIGURA No 10.1 Fuente de poder con BJT
124
FIGURA No 10.2 Fuente de poder con SCR
125
FIGURA No 10.3 Circuito impreso de la fuente con BJT
125
FIGURA No 10.4 Fuente con SCR de protección
126
8
FIGURA No 10.5 Fuente regulada con BJT y protección con SCR
127
FIGURA No 10.6 Propiedades de la corriente
128
FIGURA No 10.7 Valores de la corriente de linea
128
FIGURA No 10.8 Corriente directa de 5V
129
FIGURA No 10.9 Señal de salida regulada
130
FIGURA No 10.1 O Reducción de la tensión de entrada
130
FIGURA No 10.11 Etapa de rectificación
131
FIGURA No 10.12 Etapa de filtrado
131
FIGURA No 20.13 Etapa de regulación
132
FIGURA No 10.14 Diagrama de bloques
132
FIGURA No 30.15 Voltaje de rizo o ripple
132
FIGURA No 10.16 Fuente de Poder
133
FIGURA No 40.17 Circuito montado en Protoboard
135
FIGURA No 10.18 Puntos de medición
135
FIGURA No 10.19 Circuito completo de la fuente con micro controlador
138
FIGURA No 10.20 Circuito impreso y coleccionado
138
FIGURA No 10.21 Montaje en el circuito impreso de la fuente controlada
139
con microcontrolador
FIGURA No 10.22: Simulación en Proteus de la fuente controlada con
139
microcontrolador
FIGURA No 12.1 Circuito básico con protección fusible
143
FIGURA No 12.2 Fusible encapsulado de vidrio
143
FIGURA No 12.3 Circuitos de protección con fusible
143
FIGURA No 12.4 Varistor de óxido de metal (MOV)
145
FIGURA No 12.5 Símbolo del varistor
145
FIGURA No 12.6 Conexión del MOV
146
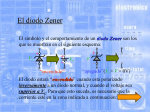
FIGURA No 12.7 Diodo Zenerforma física
147
FIGURA No 12.8 Símbolo del Diodo Zener
147
FIGURA No 12.9 Diodo avalancha
148
FIGURA No 12.1 O Conexión como circuito de protección
148
FIGURA No 12.11 Circuito detector de sobre corriente
149
FIGURA No 12.12 Circuito detector de sobrevoltaje
150
FIGURA No 12.13 Circuito de protección con SCR
150
~
9
FIGURA No 12.14 Protección contra bajo voltaje
151
FIGURA No 12.15 Regulador
152
FIGURA No 12.16 Supresores de pico
152
FIGURA No 12.17 No break
153
FIGURA No 12.18 UPS
153
FIGURA No 12.19 Circuito, volviendo a conectarlo (el clásico "apagar y
156
volver a encender")
FIGURA No 12. 20 Circuito con CI.NIS5112
157
FIGURA AP N°1 Circuito monofásico semicontrolado
161
FIGURA AP N°2 Forma de onda con ángulo de disparo a1
162
FIGURA AP N°3 Forma de onda con Angula de disparo a2
162
FIGURA AP N°4 Circuito modulador por ancho de pulso (PWM)
164
FIGURA AP N°5 Forma de onda con PWM1
165
FIGURA AP N°6 Forma de onda con PWM2
165
FIGURA AP N°7 Circuito para hallar la velocidad de un motor de C.A.
166
FIGURA AP N°8 Forma de onda con PWM1
167
FIGURA AP N°9 Forma de onda con PWM2
167
~
10
11 PROLOGO
El objetivo general del presente trabajo de investigación, consiste en la
elaboración del 'Texto: Electrónica de Potencia, Diseño y Simulación de
circuitos electrónicos de potencia", este tratado es el estudio de la Electrónica
de Potencia.
La Electrónica de Potencia está orientada al estudio de una rama de la
ingeniería eléctrica (disciplina que estudia las técnicas de producción,
transporte, tratamiento, transformación y consumo de la energía eléctrica), la
cual utiliza dispositivos electrónicos semiconductores de conmutación para
desarrollar equipos o sistemas convertidores que aseguran la transformación
de la amplitud y/o frecuencia de las formas de onda que transportan la energía
eléctrica, por lo que la electrónica de potencia es un vínculo con otras fuentes
de energía como, la energía mecánica, la térmica, la solar, la eólica, ente otras.
El desarrollo tecnológico experimentado por la electrónica de potencia durante
los últimos cuarenta años la ha consolidado en la actualidad como una
herramienta indispensable para el funcionamiento de todos los ámbitos de
nuestra sociedad, tanto el industrial como el de servicios y el doméstico.
Estos conocimientos aportan al perfil del ingeniero electrónico, la capacidad de
comprender la operación de los circuitos electrónicos de potencia, así como ser
capaz de modelar, analizar, diseñar, simular y construir circuitos electrónicos
utilizando componentes discretos, así como planear, organizar, dirigir y
controlar actividades de instalación, operación y mantenimiento de sistemas y
equipo electrónico.
Además le permite dirigir y participar en equipos de trabajo interdisciplinarios y
multidisciplinarios.
Lo anterior propicia en el estudiante el desarrollo de un pensamiento analítico,
crítico, creativo y autorregulado, con los conocimientos y las estrategias
planteadas a lo largo de su carrera y le proporciona una visión clara sobre los
sistemas de potencia y, habilidades para adaptarse a las diferentes áreas
laborales de su competencia, dando respuesta a los requerimientos de la
sociedad.
11
111 INTRODUCCIÓN
Este trabajo de investigación comprende 12 capítulos, cuyos contenidos fueron
seleccionados para iniciar desde los principios básicos de operación,
características,
parámetros
eléctricos
y
circuitos
equivalentes
de
los
dispositivos que forman la familia de los diodos, tiristores hasta su aplicación en
circuitos de disparo para el control en circuitos de conversión de energía
eléctrica como rectificación controlada, circuitos de conversión eléctrica, para
su aplicación en el control de velocidad de motores, calefactores, sistemas de
iluminación, entre otros; que le permiten al estudiante modelar y resolver
problemas típicos de la ingeniería electrónica así como tener los fundamentos
para abordar sistemas electrónicos de potencia en situaciones propias de su
especialidad en el campo industrial y de servicios, además el alumno desarrolla
su capacidad de análisis e interpretación incrementando sus habilidades de
comunicación durante el trabajo en equipo.
El contenido del capítulo 1, le permite introducirse al modelado, analizar y
simular circuitos electrónicos de Potencia, diseñar y construir circuitos de
disparo, utilizando expresiones matemáticas, determinando sus formas de onda
para representar la respuesta de dichos circuitos.
En el capítulo 11, los temas a revisar, de diodos de potencia.
En el capítulo 111 permiten analizar, diseñar y construir los sistemas
convertidores de AC - DC o circuitos de rectificación no controlados, utilizando
expresiones matemáticas y sus formas de onda, para representar la respuesta
de dichos circuitos.
En el capítulo IV, el estudiante conocerá el principio de operación del tiristor,
dispositivo bastante empleado en la electrónica de potencia, en el capítulo V la
clasificación de los rectificadores controlados con carga en la salida R, RL,RLE,
utiliza las expresiones matemáticas y obtiene formas de onda para representar
la respuesta de dichos circuitos.
En el capítulo VI, se hace un estudio de los transistores de potencia, sus
características principales de conmutación.
En el capítulo VIl se hace una descripción del funcionamiento de los
onduladores o inversores, su operación y características, se utiliza expresiones
matemáticas y sus formas de onda para representar la respuesta de dichos
circuitos.
12
En el capítulo VIII, se estudia los inversores SPWM, se hace una simulación y
se obtiene las formas de onda a la salida, se describe a los inversores
resonantes.
En el capítulo IX se describe a los interruptores estáticos.
En el capítulo X se describe las características de las fuentes de poder.
En el capítulo XI se describen los propulsores de AC.
Y en el capítulo XII se estudia cómo realizar, la protección de dispositivos y
circuitos.
3.1. OBJETIVOS Y ALCANCE DE LA INVESTIGACION
Propósito de la Investigación:
El Objetivo General del presente trabajo de investigación consiste en la
elaboración del "Texto: Electrónica de Potencia, Diseño y Simulación de
circuitos electrónicos de potencia".
Específicamente el Objetivo del presente trabajo de investigación consiste:
1. Texto: Electrónica de potencia, con respecto al diseño del circuito.
2. Texto: Electrónica de potencia con respecto a la simulación de circuitos,
3.2. IMPORTANCIA Y JUSTIFICACION DE LA INVESTIGACION
El desarrollo del trabajo: "TEXTO: ELECTRONICA DE POTENCIA, DISEÑO Y
SIMULACION DE CIRCUITOS ELECTRONICOS DE POTENCIA" será de
suma importancia porque constituye un trabajo de divulgación científica, en
donde se abordara, los diversos temas de la Electrónica de Potencia y sus
aplicaciones en los ámbitos de nuestra sociedad, tanto el industrial como el de
servicios y el doméstico, que son fundamentales en la formación profesional del
ingeniero electrónico.
13
IV. CUERPO DEL TEXTO O CONTENIDO
CAPITULO 1
INTRODUCCIÓN
AL
MODELADO,
ANALISIS
Y
SIMULACION
DE
CIRCUITOS ELECTRONICOS DE POTENCIA
1.1
Introducción
En la actualidad, la modelización y la simulación es una actividad indispensable
cuando nos enfrentamos con el análisis y diseño de sistemas multidisciplinares
de cierta complejidad.
El objetivo es ayudar o dar el soporte necesario al diseñador durante el proceso
de diseño, análisis y diagnosis de sistemas ingenieriles. El software debe
complementar el talento del diseñador para que éste pueda modelar y simular
de forma lo más eficientemente posible.
El software hace posible establecer una valoración final antes de que los
sistemas sean construidos, y pueden aliviar la necesidad de experimentos
caros y dar soporte a todas las etapas de un proyecto desde el diseño
conceptual, pasando por el montaje hasta llegar a su funcionamiento.
El análisis y diseño de circuitos electrónicos juega un papel muy importante en
la formación de todo ingeniero electrónico, desde su preparación como
estudiante hasta el ejercicio de su carrera en actividades de docencia,
investigación y de aplicación industrial.
Los ingenieros que se dedican al diseño de circuitos integrados (Cis), útiles en
una amplia gama de aplicaciones residenciales, comerciales y industriales, ven
obligatoria, dentro del procedimiento de diseño, la simulación de sus circuitos
como paso previo a la construcción de los prototipos correspondientes, con la
intención de reducir los costos de producción y ahorrar tiempo en su
comercialización.
Adicionalmente,
los
circuitos
reunirán
características
importantes de funcionalidad y confiabilidad. Ésta es la importancia de la
simulación.
Para llevar a cabo la simulación, existen una gran variedad de simuladores de
circuitos, tanto analógicos como digitales. Algunos de ellos, los más sencillos y
de menor alcance, se encuentran disponibles de manera gratuita y existen
~
14
otros, mucho más avanzados y poderosos; que requieren de la adquisición de
una licencia.
De forma genérica los simuladores de circuitos pueden clasificarse en dos
grandes grupos, uno en aquellos orientados a la resolución de ecuaciones,
como el MATLAB y un segundo grupo, orientado al manejo de diagramas
esquemáticos, como el PSpice.
~15
CAPITULO 11
DIODOS DE POTENCIA
2.1
Introducción
Entre los dispositivos de conmutación estática en la Electrónica de Potencia, el
diodo es el más simple. El dispositivo consiste en dos terminales, Ánodo y
Cátodo, donde si, el terminal del ánodo experimenta un potencial superior al
terminal del Cátodo, hace que el diodo esté polarizado en directa, lo cual hace
que circule una corriente lf a través del diodo en la dirección del símbolo del
dispositivo. También aparece una caída de tensión Vf menor a 1V.
Cuando el diodo es polarizado en inversa sucede lo opuesto, pues se dice que
el dispositivo no conduce. En realidad existe una pequeña corriente de fuga
que conduce en dirección opuesta al símbolo del diodo, pero en casos ideales,
la corriente de fuga en polarización inversa y la caída de tensión en
polarización directa, son ignora.
REVERSE-
-FORWARD
0
V
l
REVERSE
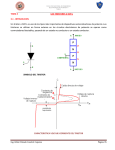
FIGURA No 2.1 Curva característica del diodo
De la gráfica de Voltaje vs. Corriente en el comportamiento del diodo se puede
notar que cuando, el dispositivo está polarizado en directa. La corriente
aumenta rápidamente a medida que aumenta el voltaje entre los terminales
ánodo y cátodo.
Sin embargo, cuando polarizado en inversa,
la corriente de fuga es muy
pequeña, hasta que se alcanza un voltaje de ruptura en los terminales del
diodo. A partir de ese nivel de voltaje de ruptura VB, la magnitud de la corriente
reversa IR a través diodo se incrementa de manera rápida.
Una aplicación típica para los diodos es su uso en circuitos rectificadores. El
objetivo de un circuito rectificador es distorsionar una entrada de voltaje
sinusoidal, generalmente de la línea de tensión de 60Hz, a una salida de voltaje
continuo.
El diodo responde a la ecuación:
I
~ Is x (é"'Kr -1)
A continuación vamos a ir viendo las características más importantes del diodo,
las cuales podemos agrupar de la siguiente forma:
•
•
•
Características estáticas:
o
Parámetros en bloqueo (polarización inversa).
o
Parámetros en conducción.
o
Modelo estático.
Características dinámicas:
o
Tiempo de recuperación inverso (trr).
o
Influencia del trr en la conmutación.
o
Tiempo de recuperación directo.
Potencias:
o
Potencia máxima disipable.
o
Potencia media disipada.
o
Potencia inversa de pico repetitivo.
o
Potencia inversa de pico no repetitivo.
•
Características térmicas.
•
Protección contra sobreintensidades.
17
2.2
Modelos estáticos del diodo
a)
Modelo ideal
b) Diodo ideal enserie
e) Diodo ideal enserie
con fuente de temión y
con la resisten:ia del
diodo en cmulo:ción
con fulmte de temión:
1
I
Vd
-=Y+=E Vd
Vd
±
E
V4
E l:'d
*'11"1---IIIIL________..t.··-=
, - - ••. -
.1 l•ltVd E
..:t...+
FIGURA No 2.2 Modelos estáticos del diodo
Los distintos modelos del diodo en su región directa (modelos estáticos) se
representan en la figura superior. Estos modelos facilitan los cálculos a realizar,
para lo cual debemos escoger el modelo adecuado según el nivel de precisión
que necesitemos.
Estos modelos se suelen emplear para cálculos a mano, reservando modelos
más complejos para programas de simulación como PSPICE. Dichos modelos
suelen ser proporcionados por el fabricante, e incluso pueden venir ya en las
librerías del programa.
2.3
Simulación en AC en función del tiempo.
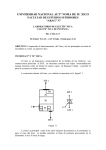
1. Encienda la computadora y corra el programa Circuit Maker.
2. Arme el circuito presentado en la figura 2.3. A parte de los gráficos mida el
voltaje DC y AC con multímetros en los puntos que se le indique que se
requieren gráficas
Rl
1. 5)1:
FIGURA No 2.3 Rectificador de media onda no controlado
18
".,
3. Varíe la amplitud y frecuencia del generador de señales (Signal Gen), así
como de los demás elementos para obtener las gráficas de las señales de los
puntos
A y B con respecto a tierra y dibújelos sobre las cuadriculas de la página 2,
colocándoles nombre para hacer la respectiva referencia, además obtenga el
gráfico del voltaje del diodo (o lo que es lo mismo el voltaje del punto A con
respecto a B) y nuevamente realice su grafico en la página antes mencionada.
4. Arme el circuito presentado en la figura 2.4
Rl
1.5k
V2
FIGURA No 2.4 Rectificador de onda completa no controlado
19
CAPITULO 111
CIRCUITOS RECTIFICADORES, MONTAJES Y SIMULACIONES
3.1
Circuitos Rectificadores
Ejercicio 1
Para los circuitos mostrados (rectificador de media onda, onda completa con
punto medio y rectificador de onda completa tipo puente) los diodos se pueden
representar por un modelo lineal con Vy = O V y Rd= 25 Q. Determinar:
a) la corriente media por la carga RL y por el diodo
b) la tensión media sobre la carga y sobre el diodo
e) la corriente y tensión eficaz sobre la carga
d) el factor de rizado
e) la tensión inversa de pico que soporta el diodo
f) el rendimiento de rectificación 11%
g) Comparar las características de cada circuito.
o
Vef= 30V
RL
400
FIGURA No. N°3.1 Rectificador de media onda
01
l
_1
_"''~ 3fN
rVef=
RL
400
l
_j
RL
AOO
:3QV
02
FIGURA N°3.2 Rectificador de Onda completa con derivación central y tipo
puente
20
SOLUCION:
El valor promedio del voltaje de salida (o carga), V.cd
El valor promedio de la corriente de salida (o carga),
Jl".d.
La potencia de salida en cd,
El valor de raíz cuadrada media (rms) del voltaje de salida, V:rms
El valor rms de la corriente de salida,
I~
La potencia de salida en ca,
Pc.a
= v'NT.IB 11'TTI3
La eficiencia (o razón de rectificación) de un rectificador, que es una figura de
mérito, y permite comparar la eficacia, y se define como
Se puede considerar que el voltaje de salida está formado por dos
componentes: 1) el valor de cd y 2) el componente de rizo.
El valor efectivo (rms) del componente de ca en el voltaje de salida es:
El factor de forma, que es una medida de la forma del voltaje de salida, es
El factor de rizo (RF, de ripple factor), es
~ 21
Si se sustituye en la ecuación:
·~
RF
2
r-m.s) = (--.
V.,.:~
(
1 = "' FF 2 -1
01
RL
AOO
l
_j
RL
AOO
FIGURA N°3.3 Rectificador de onda completa
con derivación central y puente completo.
El voltaje promedio de salida es:
Ved
2V1m
.
= = 0.6366Vm
1r:
Y la corriente promedio en la carga es:
l . = Ved = 0.6366Vm
ca
R
R
El valor rms. del voltaje de salida es:
2
]l./2
T¡2
vrms -- [-T L
:
•
(V' m Sln
wt).2.dt:
'
0
l
rms
n•
vi'\!'1.-- --;;::;0.707Vm
,1r2
Vrms
0.707Vm
=--=---
R.
R
22
La eficiencia es:
El factor de forma:
FF =
0.6366Vrn
0.707Vm
=1.11
El factor de rizo:
RF = .J1.112
-
1 =, 48..2%
' : : : : : : : : : : ;-,~·2!'~ : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : '
~ • • . . • • . • • ,:t1~t·;Jo. . . . - . . • • • . . . • • . . . . • • • .
,. . . . . . . . . . .
FIGURA N°3.4 Rectificador de media Onda
: : : :· : : : : : : ~ ; : ;.~~f';: : : : : ; ~~: : : : : ~ : : : ; ; : : : ; .: : : : : ; : : : ;
• • . . . . • . • . • ~ • :-lf.-¡.,,....
:·r¡:JI'~T~. . . . ~ . , • • • , . . . . . . . • • . . . . . .
. . . . . . --- ....... - ..... - ..... -- ... - ......... -- ....... .
6
•••••
FIGURA N°3.5 Rectificador de Onda completa
FIGURA N°3.6 Forma de Onda del Rectificador de onda completa
fiZ.
23
Ejercicio 2
Analizar en forma cualitativa, teniendo
en cuenta la constante de tiempo r, la
tensión de salida vo(rot) y la corriente
por la carga y los diodos al variar C.
01
~
._,..
)o
12'1/ef
Considerar C= 1 ¡..tF, C= 1O ¡..tF, C= 100
¡..tF.
¿Cómo conviene que sea C? ¿Qué
inconveniente presenta hacer e muy
50Hz
r~·
f Il
~
RL
vo(t)
e
1k
50Hz
~1
1'.1
V
02
grande?
¿Qué parámetros deben considerarse
para elegir los diodos?
FIGURA N°3. 7 Rectificador
derivación central con carga RC
Solución:
Análisis del circuito.Los diodos ideales, permiten el paso de toda la corriente en una única
dirección, la correspondiente a la polarización directa, y no conducen cuando
se polarizan inversamente.
1er Análisis:
Si es un rectificador de onda completa entonces tendrá todas sus crestas en el
lado positivo, listo para ser filtrado y así obtener una señal eléctrica continua,
entonces para ellos a las sea el valor del capacitar, mas continua será la señal,
veámoslo:
Utilizamos el programa de simulación proteous para simular los circuitos:
Analizando el circuito para C=1 uf VO =12:
El condensador tiene un valor relativamente pequeño, esto conlleva a que la
rectificación no será del todo completa, el circuito es el que se muestra:
R1
1k
TRAN-2P3S
1N4002
FIGURA N°3.8 Rectificador de onda completa con carga RC
El resultado obtenido a la salida es casi una señal sinusoidal (la onda amarilla
representa la señal de salida).
FIGURA. N°3.9 Forma de onda de entrada y salida con carga RC
Podemos observar también que hay un pequeño retardo, esto implica que el
tau (t) está siendo afectado (a esto se le llama rizado) por los constantes
cambios que sufre la onda para llegar a ser lineal.
2er Análisis:
Analizando el circuito para C=10uf VO =12
Al convertir la tensión de voltaje en continua también se convierte la corriente,
esto es porque el voltaje está relacionado con la corriente.
~25
Resultados del osciloscopio al aumentar el valor de C a 1Ouf
FIGURA N°3.1 O Formas de Onda al aumentar C=1 OuF
No tamos en la gráfica que la señal de salida se va haciendo cada vez mas
continua, en este caso con una tensión máxima de 10.5 y mínima de 8.5V, la
corriente es constante pero al igual que la sesión también se vuelve continua
3er Análisis:
Analizando el circuito para C=1 OOuf VO =1
La constante tau ya no será tomada en cuenta una vez que la tensión sea
contante y sus parámetros hayan desaparecido (frecuencia, amplitud, periodo)
FIGURA N°3.11 Forma de onda al aumentar C= 1OOuF
26
Valor de salida:
Vout ==8.5V
La señal eléctrica de salida es prácticamente una señal continua, pues el
condensador actúa con un filtro, almacenando energía y en el proceso de carga
y descarga, este va linealizando de forma constante a la tensión alterna.
20.ooV
tO.OOV
-
_-¡ \
'V-\
1
fl
OJJOOV
E-\
-10.00V
-2000V
§""
\
1
\
-
-:;crov ¡=-----
fo..
1
r/\_\ t\
\
'J
~\-/___
-<O.OOV
tO.OOm'ii
2f•.C.Cms
1
,;.,--- - 1__l
7_ -"._
\
1
1 \
1 \
/I/
\ 1~-1_
'--./
1\
f-----·
-:1 \
-
\
JJL
'-./,
~-
O.OC'Cm'!
1
¿;...,..
-"""
1
~V-
w.rons
1
1
'-"¡
r~-~+\-1r.. '--"
tt
lti --t\-fi--
~~~~ ~~t~j~ ~~
11
40.0Cms
50.V'Jms
SC.OOms
70.0Ctns
eo.tí'ms
FIGURA N°3.12 Carga y descarga de un condensador
¿Cómo conviene que sea C?
Depende, si este se requiere para hacer una fuente que convierta la tensión
alteña a continua, es conveniente que el condensador sea más grande ya que
así las crestas de la tensión alterna se descargaran más lentamente y se
producirá con mayor nitidez una tensión continua.
¿Qué inconveniente presenta hacer e muy grande?
Ninguno, solo no se recomienda porque tan solo basta con 2200uf de C para
lograr una tensión continua adecuada.
¿Qué parámetros deben considerarse para elegir los diodos?
Primero se tiene que elegir con que corriente máxima se va a trabajar, para ello
hay diodos de 1,2, 3 y de más amperaje, generalmente para una fuente casera
se utiliza la de 3 amperios.
27
Ejercicio 3
El
circuito
anterior
se
YS
01
modifica
agregando un regulador Zener.
YO
Rs
vi
Analizar el funcionamiento del circuito.
......
CL
I
Dibujar las tensiones vi, vs y vo.
Qué parámetros se necesitan conocer
para elegir el diodo Zener y los diodos.
RL
07
vi
=12 V sen wt,
FIGURA N°3.13 Circuito rectificador
de onda completa con regulador de
voltaje
Hallaremos el voltaje promedio de la salida:
Si se diseña bien el circuito estabilizador, la tensión a la salida debe ser la
misma, e igual
a la tensión zener, tanto para ILC=1 OOmA como para
desconexión en la carga.
Para poder calcular el valor de la resistencia !imitadora Rlim, necesitamos
conocer la tensión a la salida del filtro (entrada del estabilizador):
¡·
r _-
2J3
_
- --
vnU(<!/Jt:tr) _
VJ,C(m~d.o)
'
JlJ_,c
V
JIo :::;JI¡,e +-'
·
J!r
. JI_
2 (:;.3·
.Ti
=:>
- ...,¡~ · r · ,..
2 "'11--'
¡;;3 .JI J,c
J.C
(1]
1'
,(2]
2
-~--------~--~--------
-----
(1) en (2)
,~----- ---~----
V = J1
O
LC'
+
2.J3·r·JI
·
2
, 1.c
---- ----·
::::::>
----------.,.--~ ----~--~-~~
2Jl = 2ll ~ + 2-J) · r · JI
O
U.
I.C
=> V
¡,e
=
2V0
2 + :2./3· r
:
1
28
Ya que no disponemos de dato del rizado, estableceremos un 10%:
"']/
L.J .
111,c. =
= 361v ~V..= 2.J3 · 0.1· 361 = 125v
.
2+2 3·0.1
'
La variación de la tensión de la entrada del estabilizador es:
1
Jl¡- 1111 .,...•
::;:
Jl,IJ: 424v v¡
JIimm. =JI
> ·150v =JI:
· r, -JIt = 424-125: 299v
·
~
~
:
¡'
Valores límite de R:
I
R . _. = J iJitl:tn:
hll11l1U1
-JI
~mm.:
1.1. m . + 1
n1
R..luilmax
= .JI
::
- Ji
¡min
1l.max
(no conocemos la potenda del zener: ~ ..,.,.,. :;;;; V!· 1:ma>:)
:max
:n1in
+].
:mm
= Íl
.
1
299 - 150
} . _3
00 + 2 ·lO
=13770. => R =1377fl
1·,n1
En un rectificador por filtro con condensador, el rizado aumenta a medida que
aumenta la corriente por la carga. Calcularemos el condensador para el caso
más extremo o desfavorable, es decir, cuando ILC=Izmax (desconexión en la
carga).
Con una resistencia !imitadora de 1377 ohm, la máxima corriente que circularía
por el zener es:
1
-:
-----~~---·---·
R . . =Vim<~x-JI:max =R. =;>B 77 ;;;:424-150=>/
;;;:424-150_ 0_199 A
t,mmm
1
1
hm
0+ 1
:mro-:
1377
J.min
l
C ;;;:
1LC
:;::
+
:max
0. 199
:mm;
=)6JlF
_ ___ 2:__j ·V,. _ 2· 50· .125
;f?-
29
El diseño simulado es el que sigue:
FIGURA N°3.14 Circuito rectificador de onda completa con regulador Zener
FIGURA N°3.15 Formas de onda de entrada y salida del circuito regulador
Ejercicio 4
Se quiere diseñar una fuente no regulada con un puente de diodos y filtro a
capacitar. Las especificaciones son: corriente continua de salida 1 A y tensión
continua de salida 70 V con un rizado máximo de 2.5 V de pico.
a) Dibujar el circuito
b) Dibujar la forma de onda de tensión de salida. Calcular el valor de C.
e) Suponiendo que en cada diodo cae una tensión de 0.7V, estimar el valor
eficaz de la tensión de entrada.
d) Estimar la corriente media por cada diodo y la tensión inversa de pico.
e) Considerando los valores obtenidos elegir los diodos a partir de las hojas
de datos de la familia 1N4001-1N4007.
~
30
f) Verificar si los diodos elegidos podrían usarse si en lugar de utilizar un
puente se utiliza un rectificador con punto medio para las mismas
condiciones de diseño.
SOLUCION:
·:::::
: : :
::::~L,:·:::::::
: : : : : fTj;~T>: : : : : : :
: : ~'-: : t: : : : : : : : : : :
. . .
·<rT·E>'.T>
· ·
· • • ·
: : : : : :
....
~~. ~ 1: .. : f~:x,;
. .BA 1. . . . . . . . . . .
·
::::::
<-TEXT, . .
• • • •
........................
. --=- . . .
. ................ .
FIGURA N°3.16 Rectificador de media onda carga RC
Se tiene que:
Por consiguiente, el voltaje promedio en la carga
V~,¡!( suponiendo
que tz, = 1/2f)
es:
V
c.d
= V.:m -
Vr(pp)
2
= V.:
m.
Así, el voltaje rms de rizo en la salida Ves se puede determinar en forma
aproximada como:
=
V
ce
Vr(pp)
2·Vl
=
Vm
thfi{RC1
El RF se puede calcular como:
1-)
(1
+
4/R
,fiRF
e = _2__
ll
5- A un circuito rectificador de media onda se le aplican 1O V eficaces y se lo
carga con RL. Suponiendo para el diodo un modelo lineal por tramos
31
representado en directa por Vy = O V y Rd= 20 Q, y en inversa con ls = 0.075
~
constante:
a) Obtener la expresión del valor medio de la tensión sobre la carga en
función de RL.
b) Calcular para RL= 1 Kn, 50 KQ, 1 Mn. Comparar resultados.
e) Repetir considerando Vy = 0.7 V, Rd= 20
n. Analizar resultados.
Solución:
Circuito empleado para eliminar la parte negativa de una señal de
corriente alterna de entrada (Vi) convirtiéndola en corriente continua de
salida (Vo).
Es el circuito más sencillo que puede construirse con un diodo.
03
TR2
R2
10k
TRAN-2P2S
FIGURA N°3.17 Circuito rectificador de media onda, carga R
Análisis del circuito (diodo ideal)
Los diodos ideales, permiten el paso de toda la corriente en una única
dirección, la correspondiente a la polarización directa, y no conducen
cuando se polarizan inversamente.
Polarización directa (vi > O)
A K
V¡
FIGURA N°3.18 Circuito a la salida con R
32
En este caso, el diodo permite el paso de la corriente sin restricción. Los
voltajes de salida y entrada son iguales y la intensidad de la corriente
puede fácilmente calcularse mediante la ley de Ohm: (en casos prácticos
se debe tener en cuenta que el diodo tiene una resistencia interna y que
la fuente también proporciona otra de un mayor valor).
Vo =Vi
Como se aplica la polaridad positiva de la fuente al ánodo y negativa a
través de la resistencia al cátodo, el diodo es polarizado en directo,
entonces:
VD= 0.7v
VR = VF- Vo = VF- 0.7
Vf
+
VR
FIGURA N°3.19 Rectificador de media onda con carga R
Si VF = 10v; R = 20 VR = 9.3v Vo = 0.7 10 = 1 = 0.5A
Como la fuente aplica polaridad negativa al ánodo y positiva a través
de la resistencia hacia el cátodo el diodo es polarizado en inverso,
entonces:
1 =lo= O si 1 =O O VR = Rl =O
Vo = VF- VR = VF- O= VF (en inverso)
La señal resultante del circuito en el osciloscopio del programa de
simulación proteus es el siguiente:
33
FIGURA N°3.20 Forma de onda de entrada y salida del rectificador
de media onda carga R
La señal de color amarillos es la tensión de salida del circuito, como podemos
apreciar esta solo nos r:nuestra la parte positiva de la onda, por ello el nombre
de rectificador de media onda.
Como se aplica la polaridad positiva de laTensión rectificada.
Como acabamos de ver, la curva de transferencia, que relaciona las tensiones
de entrada y salida, tiene dos tramos: para tensiones de entrada negativas la
tensión de salida es nula, mientras que para entradas positivas, las tensiones
son iguales. El resultado es que en la carga se ha eliminado la parte negativa
de la señal de entrada.
V¡
Vo
-+
(
curva de
transferencia
---~-----V¡
-+
Onda rectificada
(media onda)
FIGURA N°3.21 Curva de transferencia entrada vs salida
6- El circuito de la figura es un rectificador de salida complementaria. Para un
ciclo de la tensión de entrada vi analizar el funcionamiento y dibujar las
tensiones de salida vo1 y vo2. (Suponer diodo ideal).
34
Si se pretende obtener una tensión media de salida de 15 V calcular el valor
eficaz de vi si se supone que en cada diodo hay una caída de 0.7 V cuando
conduce.
Calcular la tensión inversa de pico en cada diodo.
03
01
02
04
FIGURA N°3.22 Rectificador de onda completa salida complementaria
Calcularemos la vi:
V.c.d
=
T}'z
L
VmSen(wt}dt =
2Vm
= lt6~366:tfm
I
·O
Suponiendo que hay una caída de tensión por parte de los diodos de 0.7V
entonces:
V·Ol =
Vi
0.63:66
- 2x0,.7
Vo1=V02
35
De lo cual se tiene la siguiente respuesta obtenida mediante un simulador:
..,..
•04
101
"v
.,.,..,
IDU:
_:]
,,..,.
r-
-:"v
,1)3
,---
-02
·IDU!
·IDI.
1
'
'
,.,
"'!D."Jio'
'"'t.I:A."'I'1
Jl2.
o
·~
...
r
1
t .
i
1
'"-""
,.
1
..
~-~
....
.
-· li
- • .. --J -+ ..
r
;
R1
t
..
FIGURA N°3.23 Circuito para simular el rectificador de onda completa
En esta figura se puede ver la tensión de salida del circuito:
'.
-
D1
....,
..,.E:xr
03
.. otODE,..
.,.---~r--::-1~
D4
..pJOOe.,-
··DIODE.-.
<TF!Ih
02
~
.cTS.:W.TJ
.
"
.
"'lf:<l~
t·
FIGURA N°3.24 Medición a la salida del rectificador de onda completa
FIGURA N°3.25 Formas de onda a la entrada y salida del rectificador
de onda completa
7- El circuito anterior se modifica colocando un capacitar C en paralelo con
cada carga. Se pretende una tensión de salida promedio de 15 V± 0.5 V y una
36
corriente continua de 200 mA sobre cada carga. Especificar C, el valor eficaz
de vi y elegir los diodos.
Suponer para los diodos una caída de O. 7 V en conducción
t
.
R1
1
1
'"''1-------1
C1
....ro
--·----·
•lElif•
1
t
.. _.......__ _____ l. -
~-
_ .......... - - . ..L. - - ~
FIGURA N°3.26 Medición en la salida complementaria del rectificador
de onda completa
Solución:
Calcularemos la vi:
De donde vi= 15
2Vm
Tfa
Ved=.
i
·o
VmSen(wt)dt = H
Suponiendo que hay una caída de tensión por parte de los diodos de 0.7V
entonces:
VOl=
Vi
- 2x0.7
0.6366
V01 = 10,,;
Teniendo en cuenta que los condensadores tienen una caída de 0.7V se
obtiene que:
e= 10uF
37
3.2
Diseño y verificación de un rectificador monofásico de media no
controlada con carga R, RL.
Objetivos:
o
Comprobación del funcionamiento del rectificador monofásico de media
onda con carga resistiva e inductiva. Efecto del diodo volante sobre la carga
inductiva.
o
Análisis comparativo de los resultados teóricos y experimentales.
Explicar posibles divergencias.
Marco Teórico:
La entrada de la mayoría de los sistemas de potencia, que se alimentan
directamente de la red alterna, está formada por un circuito rectificador. La
tensión alterna (60Hz) se rectifica y se filtra ligeramente para obtener una
tensión continua que alimenta a los reguladores.
El rectificador de media onda generalmente se usa sólo para aplicaciones de
baja corriente, o de alta frecuencia, ya que requiere una capacitancia de filtrado
mayor para mantener el mismo voltaje de rizado que un rectificador de onda
completa.
Un rectificador simple de media onda de este tipo no es una buena
aproximación a una ce constante en forma de onda; contiene componentes de
frecuencia de ca a 60Hz y todos sus armónicos. Un rectificador de media onda
tiene un factor de rizado r = 121%, lo que significa que tiene más componentes
de voltaje de ca en su salida que componentes de voltaje de ce. Obviamente, el
rectificador de media onda no es, en consecuencia, una forma muy buena de
producir voltaje de ce a partir de una fuente de ca.
Durante el intervalo t=O -> T/2, la polaridad del voltaje aplicado Vrms es igual a
la que contiene el diodo cuando sé esta polarizado directamente, por lo que
conduce el diodo y permite el pico positivo, pero cuando T/2 -> T, la
polarización de la entrada se invierte y el diodo no conduce.
Materiales:
o
Balastro
38
o
o
o
o
o
o
Resistencia
Diodo
Multímetro
Osciloscopio
Transformador
Cables
Montaje Experimental:
Realizar el montaje del rectificador de media onda, con carga resistiva.
· · · · · L1 ·
· TR1 ·
-
·::::~::~-2~2~············
..•................................
'
...... -- ............ .
'
FIGURA N°3.27 Rectificador de media onda carga RL
Se dispone de un transformador de red (220/32 Vac), un interruptor y un fusible
(rearmable), tal y como se indica en la figura, montado en una caja que
llamaremos "tarjeta de red".
FIGURA No 3.28 Conexionado de los dispositivos para el rectificador de media
onda con carga RL
~39
1.
Conectar
la "tarjeta de red" a la toma de red y verificar con el
osciloscopio que se obtiene una tensión senoidal de 32 Veff aprox., una vez
encendido el interruptor. Medir con el multímetro el valor eficaz de dicha
tensión senoidal.
FIGURA N°3.29 Forma de onda a la entrada
FIGURA N°3.30 Formas de onda a la salida
2.
Apagar el interruptor y conectar al transformador un diodo rectificador y
una carga de 31.30, de acuerdo con la configuración de la figura (rectificador
de media onda) .
. . . :::::: t~-21;'2$:::::::::::::::
FIGURA N°3.31 Rectificador de media onda con carga R
FIGURA N°3.32 Formas de onda a la entrada y salida del
rectificador de media onda
~
41
3.
Dibujar la forma de onda de tensión y corriente en el secundario del
transformador y de tensión y corriente en bornes de la carga.
: : :Grafica :de :onda :de tension :en el :secundario : :
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
o
•••••••
FIGURA N°3.33 Tensión y corriente en el secundario del transformador
:. : :Grafica :de onda :de corriente: en: los: bornes :de :la :carga. :.
FIGURA N°3.34 Forma de onda del rectificador con carga RL de la tensión y
corriente
/'
42
4.
Dibujar la forma de onda de la tensión anodo-catodo del diodo
rectificador. Para una carga máxima de
31.30
verificar la corriente directa por
dicho diodo y su tensión inversa
-
-
...........................................................................
FIGURA N°3.35 Circuito rectificador de media onda con diodo volante
FIGURA N°3.36 Formas de onda para medir la tensión inversa en el diodo
5. Medidas experimentales: Se van a efectuar medidas de valor de pico, medio
y eficaz de tensión en la carga y en el secundario el transformador. Recordar
que para carga resistiva y rectificador de media onda obtenemos los siguientes
resultados teóricos, donde es el valor pico:
Valor medio:
V
u-__!!!_
do- 1r
Valor eficaz:
V
ud _eff =__!!!_
2
~43
Las medidas podrán hacerse con el osciloscopio o con un multímetro. Aunque
la medida con el osciloscopio es más inmediata no es tan precisa, además
algunas medidas pueden no ser correctas o no pueden realizarse, así pues es
conveniente medir con el multímetro o con el osciloscopio según el tipo de
medida.
Las medidas con el multímetro solo serán si se utiliza un instrumento "true
RMS".
Hay que tener en cuenta que cada medida debe realizarse
seleccionando las opciones adecuadas. Concretamente hay que acoplar el
instrumento en de, ac+dc o ac según la medida a efectuar.
•
Medir con el osciloscopio el valor de pico de la tensión sobre la carga y a
partir de ese valor calcular, con las expresiones que se ha dado, los valores
medio, eficaz y Anotarlos en la tabla.
FIGURA N°3.37 Medición de la tensión pico
•
Medir con el multímetro el valor de la tensión en el secundario del
transformador, y el valor eficaz.
FIGURA N°3.38 Medición en el secundario del transformador, tensión pico y
eficaz
44
6.
Medidas experimentales de
los parámetros de
rendimiento
del
rectificador de la figura 1a, tomando una carga positiva de 31.3Q.
Las medidas de corriente se efectuarán sabiendo la tensión sobre la carga y el
valor resistivo de ésta.
1. Efectuar ahora diferentes medidas pero cambiando la resistencia de
carga. La carga será ahora de 1 kO.
v;,ficaz = 12V ~ Vm = Jiv;,ficaz
=12-Ji =16, 97V
2
2
vmedio =- vm ~ vmedio =-X 16,97 = 1o, 8V
1l
1l
i
= v;,ficaz
eficaz
R
= 12V =12mA
i
= Vmedio
medio
R
= 10,8V =10 8mA
V,.ms
Írms
1KQ
1KQ
·
= v;,~caz -V;edio =~12 2 -10,8 2
=5,23V
= V,.ms = 5, 23V = 5 23mA
R
1KQ
'
Pac = vmedio Ximedio = 1O, 8V X1O, 8mA =116, 64m w
~e=
v;,ficaz Xieficaz
=12Vx12mA = 144mW
= Pac = 116,64 = 0.81
r¡ ~e
144
1" = v;,ficaz = 12V =
111
JF
'
1O, 8V
5 23
r = V,.ms = ' V =O 4843 = 48 43%
Vmedio 10,8V
,
'
•
Vmedio
¿Es ahora diferente la tensión de pico sobre la carga respecto al caso
con R=31.30? en caso afirmativo, ¿A qué dos factores principales puede ser
debido?
45
La tensión pico no es dependiente de la carga sino de la señal de entrada
senoidal por lo que en ambos casos el valor será de 16,97V ya que la entrada
tiene un valor eficaz de 12V.
Medir con el multímetro el valor medio de la tensión en el secundario del
transformador,{<Vsec>) y el valor (Vsec_eff).
•
¿Ha cambiado el valor medio de la tensión en el secundario del
transformador? ¿Por qué se produce este cambio respecto al caso R=31 ,30?
Solo habrían cambios si es que hubiese bobinas o capacitares en el circuito
pero como solo se encuentra la parte resistiva, los valores de las tensiones no
varían solo van a variar los valores de las corrientes.
2. Rectificador monofásico de media onda con carga RL.
•
Como carga inductiva se toma
el
secundario de un pequeño
transformador de red, cuya inductancia magnetizante es de 226 mH y la
resistencia de 25.5ohm a la frecuencia de 1OOhz (medida tomada con el
analizador de impedancias).
•
La parte resistiva de la carga será: resistencia bobinada de 31.3ohm
(realmente si debieran hacerse cálculos precisos hay que sumarle la
introducida por el bobinado de la inductancia de la carga).
Visualizar la tensión en bornes de la bobina, la corriente por el diodo
rectificador y la tensión ánodo cátodo del diodo rectificador.
. ::::: .... iü:
02 . . . . . . .
-~00 .
. OIODE . • . . . .
:::::~-~: ...
:::::::::::::::·
FIGURA N°3.39 Puntos de medición en el rectificador de media onda carga RL
con diodo volante
46
Tensión en bornes de la bobina
FIGURA N°3.40 Tensión en los bornes de la bobina
FIGURA N°3.41 Forma de onda en la bobina
o
Corriente por el diodo rectificador
FIGURA N°3.42 Corriente por el diodo rectificador
47
o
Tensión ánodo cátodo del diodo rectificador
FIGURA N°3.43 Tensión ánodo cátodo del diodo rectificador
•
Medir con el osciloscopio el valor pico y con el multímetro los valores
medio y eficaz de la tensión sobre la carga. A partir de la forma de onda
realizar una medida del ángulo de extinción de la corriente. Anotar los
resultados en la tabla adjunta.
FIGURA N°3.44 Medición del Angula de extinción
8.
Tomar ahora como carga inductiva el primario del transformador de red
(L=8.7H
& Rs=8510 a 100 Hz, medido en el analizador de red). Observar
como el ángulo de extinción de corriente ha aumentado considerablemente,
debido al incremento en la constante de tiempo de la carga r=L!Rs fuese mayor
de T/2 la corriente de carga no llegaría a anularse y estaríamos en un modo de
funcionamiento continuo.
48
Dado el bajo valor de la corriente de carga, no es posible realizar su medida
con la sonda de corriente DC. En su lugar se medirá la tensión VR entre
extremos de la resistencia de 31.30 en serie con la inductancia de carga
siendo ld=VR/31.30.
,
+
--;-->
+
FIGURA N°3.45 Rectificador de media onda con carga RL
mcz*EB
o:::::::::::::::::!::·::·········+::::::::::::::::~::·::
,
(J
.......... .
'"-11
/i)f
~·~
•····•~-··
·•••••••••••••u•••
·•*••••••••••H••"'""~·••·••"
a~:::::::::::f~
13
1l
(()t
211
~~
. .. lA ' "'01
:::::::::::::::::¡:::::l:~:::::::::::::::::;:::::k:=
~O
o o
0 O O W O N
o~
o
o o
0 O o O O O O o
o o o 0 0-:- O O
N
o 0
O O O O-:-- o o o
o 0
00 O 00 O O O o o o
6==t:~
n
~
2n
wt
11<1)
~¡ .--- . -. . . . . • -.
-~
~
... - . . ...• - . - -. ,;. - .. -- ....... -. -- .¡." . . . - .•.. ---.
···············-······· .................... , ..............
~
~
'1°11
----·
'
... .
(ilt
FIGURA N°3.46 Formas de onda, rectificador de media onda con carga RL
Primero encontraremos la fórmula que rige
en el ángulo de extinción de
corriente:
Vmsen(mt)
= Ri(t) + L di(t)
dt
49
La corriente puede obtenerse como la sume de la respuesta forzada y la
respuesta natural:
i(t) =ir (t) +in (t)
La respuesta forzada para este circuito es la corriente existente después de
que la respuesta natural haya caído a cero. En este caso, la respuesta forzada
es la corriente sinusoidal de régimen permanente que existiría en el circuito si
el diodo no estuviera presente. Ésta corriente de régimen permanente puede
obtenerse mediante un análisis de fasores, que da como resultado:
i1 (t)=(~· )sen(mt-8)
donde Z
=~R 2 +( mt)
2
y 8
=tan-1 ( ~)
La respuesta natural es el transitorio que tiene lugar cuando se proporciona
energía a la carga. Es la solución a la ecuación diferencial homogénea para el
circuito, sin generador ni diodo:
Ri(t) + L di(t) =O
dt
Para este circuito de primer orden, la respuesta natural tiene la siguiente forma:
i"(t) = Ae
r
Sumando las respuestas forzada y natural se obtiene la solución completa:
i(t) =if (t) + i 11 (t) =
V
;• sen( mt- 8) +A e
_!_
r
La constante A se calcula usando la condición inicial para la corriente.
i(O) = V"' sen( O- 8) + Ae0 =O
z
V
V
z
z
A =-__!!!_sen(-8) =__!!!_sen( 8)
50
Reemplazando:
i(t)= V~· [ sen(OJt-B)+sen(B)e _!_]
r
El primer valor positivo de wt en la misma ecuación que da lugar a una
corriente nula se conoce como ángulo de extinción, b. Si sustituimos wt = b, la
ecuación que debe resolverse es:
V [
i(OJt)= ~· sen(OJt-B)+sen(B)e
i({J) =
¡H
_M]
m
sen(fJ- 11) +sen( B)e :, ] = O
fJ
sen(/3- B) +sen( B)e m = O
J3 es el ángulo de extinción de la corriente y aunque la expresión matemática no
se puede despejar por métodos simples ,si no por métodos numéricos nos
muestra de alguna manera la relación de esta con las demás componentes del
sistema.
Analizando ahora en el problema:
lenslonrecllflcada-- - -
,::¡/:'•\.
•'·'.
\
;"'"lf,'l:"ll o
¡r·~l
·¡
.,,
!
., \\
.J
1
1
1
..1:
>
1
·..,L
.r
f
\
.¡
\,
\
\
\
1
'·
,.
.·:.:-,.-- ... -;;.-.: --- .. -. :,-,· ..... -- :-·.------ ... :-- .... - -.·
•.
1•'1•.
..
'
.. : ¡: ... \ . / :. . .. . : .
:_
.
'
~
•'"~·('-;.-~--;- ~!...... ~---~~ ": ... -.----
- .... ------·
---·;·····-~..
FIGURA N°3.47 Formas de onda en el rectificador de media onda con carga RL
No aparece Ud=O, por lo tanto el rectificador opera en modo continuo.
51
f
1
T
=100Hz=> T=- =0 Ols =10ms =>-= 5ms
f
'
2
L
8,7H
r = - = - - = 0 01022=10 22ms
'
'
Rs 851Q
Se puede observar que cuando aumenta
T
también aumenta el angula de
extinción de manera que llega a un punto donde que por más que se encuentre
un diodo el circuito tiene un funcionamiento continuo.
9. Una vez analizado el montaje anterior, repetir los apartados con carga RL y
L=226 mH añadiendo un diodo volante en paralelo con la carga como en la
figura 2. Observar las formas de onda de la tensión sobre la carga Ud. Pueden
aparecer 3 tramos diferenciados, o solo 2 primeros de la lista siguiente:
............................
'
...... .
: : : : : : : : : : : : : : !~1.. : : : : : : : : : 01 : : : : : : : ~ 1 : : : : . . . . . . . . - - - - -.......
.....................
-
'
-
.......................... ' ........... .
FIGURA N°3.48 Formas de onda a la salida con diodo volante y carga RL
No aparece Ud=O, por lo tanto el rectificador opera en modo continuo.
Medir con el osciloscopio el valor de pico y con el multímetro los valores eficaz
y medio de la tensión en la carga. Comentar la diferencia en el valor medio
respecto al caso en que no había diodo volante.
52
FIGURA N°3.49 Medición del valor pico
1O.
Justificar mediante la expresión adecuada la relación entre la tensión y la
corriente por la bobina. ¿Qué tensión soporta la bobina cuando la corriente por
ella es máxima? Cuando la corriente es máxima la tensión que soporta la
bobina es casi cero como lo podemos apreciar en la gráfica siguiente:
FIGURA N°3.50 Forma de onda de la corriente y la tensión en la salida
53
11. Dibujar la corriente por la. carga y la corriente por el diodo rectificador y
volante.
Corriente por el diodo rectificador y volante (rojo)
Corriente por la carga (verde)
·FIGURA N°3.51 Corriente por el rectificador y diodo volante y
.corriente por la carga
~
..
. -
54
CAPITULO IV
EL TIRISTOR, TRIAC, ELEMENTOS DE DISPARO
4.1
Introducción
El Tiristor, fue desarrollado por ingenieros de General Electric en los años
1960. Aunque un origen más remoto de este dispositivo lo encontramos en el
SCR creado por William Shockley (premio Nobel de física en 1956) en 1950, el
cual fue defendido y desarrollado en los laboratorios Bell en 1956. Gordon Hall
lideró el desarrollo en Margan Stanley para su posterior comercialización por
parte de Frank W. "Bill" Gutzwiller, de General Electric.
Compuerta
FIGURA N°4.1 Símbolo y estructura interna del tiristor
El tiristores es un dispositivo de cuatro capas, semiconductor de tres terminales
que se usa para controlar el flujo de corriente promedio a una carga, con la
particularidad de que conduce en ambos sentidos y puede ser bloqueado por
inversión de la tensión o al disminuir la corriente por debajo del valor de
mantenimiento. El triac puede ser disparado independientemente de la
polarización de puerta, es decir, mediante una corriente de puerta positiva o
negativa.
Los terminales principales, ánodo y cátodo etiquetan, se encuentran en las
cuatro capas completas, y el terminal de control, llama a la puerta, se une al
material de tipo p cerca del cátodo. El funcionamiento de un tiristor se puede
entender en términos de un par de transistores de unión fuertemente acoplados
bipolares, dispuestos para hacer que la acción de auto-retención:
Tiristores tienen tres estados:
o
Reverse modo de bloqueo - El voltaje se aplica en la dirección que se
bloqueado por un diodo
¡:?55
o
El modo de bloqueo Delantero - El voltaje se aplica en la dirección que
causaría un diodo para llevar a cabo, pero el tiristor aún no se ha activado en la
conducción
o
Modo de llevar a cabo Forward - El tiristor se ha disparado en la
conducción y se mantendrá hasta la realización de las gotas hacia delante
actuales por debajo de un valor umbral conocida como la "corriente de
mantenimiento".
4.2
Formas de Activar un Tiristor:
o
Luz: Si un haz de luz incide en las uniones de un tiristor, hasta llegar al
mismo silicio, el número de pares electrón-hueco aumentará pudiéndose
activar el tiristor.
o
Corriente de Compuerta: Para un tiristor polarizado en directa, la
inyección de una corriente de compuerta al aplicar un voltaje positivo entre
compuerta y cátodo lo activará. Si aumenta esta corriente de compuerta,
disminuirá el voltaje de bloqueo directo, revirtiendo en la activación del
dispositivo.
o
Térmica: Una temperatura muy alta en el tiristor produce el aumento del
número de pares electrón-hueco, por lo que aumentarán las corrientes de fuga,
con lo cual al aumentar la diferencia entre ánodo y cátodo, y gracias a la acción
regenerativa, esta corriente puede llegar a ser 1, y el tiristor puede activarse.
Este tipo de activación podría comprender una fuga térmica, normalmente
cuando en un diseño se establece este método como método de activación,
esta fuga tiende a evitarse.
o
Alto Voltaje: Si el voltaje directo desde el ánodo hacia el cátodo es
mayor que el voltaje de ruptura directo, se creará una corriente de fuga lo
suficientemente grande para que se inicie la activación con retroalimentación.
Normalmente este tipo de activación puede dañar el dispositivo, hasta el punto
de destruirlo.
o
Elevación del voltaje ánodo-cátodo: Si la velocidad en la elevación de
este voltaje es lo suficientemente alta, entonces la corriente de las uniones
puede ser suficiente para activar el tiristor. Este método también puede dañar
el dispositivo.
o
AGT - Ánodo Tiristor Puerta - Un tiristor con la puerta en la capa de tipo
n cerca del ánodo.
4?
56
o
o
ASCR - Asimétrico SCR
BCT - Tiristor de control bidireccional - Un dispositivo de conmutación
bidireccional que contiene dos estructuras de tiristores con contactos de puerta
separados
o
BOD - irrupción Diode - Un tiristor sin puerta provocado por la corriente
de avalancha
o
Dispositivo de disparo bidireccional - DIAC
o
Dynistor - dispositivo de conmutación unidireccional
o
Diodo Shockley- gatillo unidireccional y el dispositivo de conmutación
o
Dispositivo de conmutación bidireccional - SIDAC
o
Trisil, SIDACtor- dispositivos de protección bidireccional
o
o
o
GTO - Puerta de apagado del tiristor
o
Buffer Distribuido - puerta de apagado del tiristor
o
MA-GTO - Modificado ánodo puerta de apagado del tiristor
o
o
o
LASCR - Luz activada SCR o LTT - tiristores activados por luz.
ETO - Emisor de apagado del tiristor
IGCT - tiristor conmutado de puerta integrada
LASS - interruptor semiconductor activado por la luz
Tiristor controlado por MOS - MOSFET tiristor controlado - Contiene dos
estructuras FET adicionales de control on/off.
o
BRT - Resistencia Base Controlado Tiristor
o
o
RCT - tiristor conductor inversa
PUT o PUJT - Programmable Unijunction Transistor - Un tiristor con
puerta en la capa de tipo n cerca del ánodo utilizado como un sustituto
funcional para monounión transistor
o
SCS - Silicon interruptor controlado o tiristores Tetrode- Un tiristor tanto
con cátodo y ánodo puertas
o
o
SCR - rectificador controlado de silicio
Sith - Tiristor inducción estática o ésimo - Campo tiristor controlado - que
contiene una estructura de la puerta que se puede cerrar el flujo de corriente
del ánodo.
o
TRIAC - triodo para corriente alterna - Un dispositivo de conmutación
bidireccional que contiene dos estructuras de tiristores con el contacto
frecuente puerta
57
o
o
Puerta integrada tiristor conmutado
MOS compuesto tiristor inducción estática/CSMT.
4.3 El Triac
Un TRIAC o Triodo para Corriente Alterna es un dispositivo semiconductor, de
la familia de los tiristores. La diferencia con un tiristor convencional es que éste
es unidireccional y el TRIAC es bidireccional. De forma coloquial podría decirse
que el TRIAC es un interruptor capaz de conmutar la corriente alterna.
Su estructura interna se asemeja en cierto modo a la disposición que formarían
dos SCR en direcciones opuestas.
Posee tres electrodos: A 1, A2 (en este caso pierden la denominación de ánodo
y cátodo) y puerta. El disparo del TRIAC se realiza aplicando una corriente al
electrodo puerta.
Las terminales de Triac son las siguientes.: MT1 (Main Terminal1) o A1 (Anode
1 ), en ciertos encapsulados la parte posterior metálica también forma parte de
MT1, MT2 (Main Terminal 2) o A2 (Anode 2), G (Gate) o compuerta
TRiAC
tJpk:o
1
1"0-.Z?O
o~
G
l--0
MT1-
Triac Symbol
MT2,
FIGURA N°4.2 Símbolo del triac
FIGURA No 4.3 Forma física del triac
El triac es un dispositivo electrónico semiconductor de tres terminales, de ahí
que se le conozca como un tiristor y se usa para controlar el flujo de corriente
promedio a una sola carga, con la particular capacidad de dirigir la corriente en
ambos sentidos y puede ser bloqueado por inversión de la tensión
o al
disminuir de la corriente debajo del valor de mantenimiento, el Triac puede
ser disparado independientemente
de la polarización de puerta, es decir,
mediante una corriente de puerta positiva o negativa.
58
Cuando el triac conduce, hay una trayectoria de flujo de corriente de muy baja
intensidad de una terminal a la otra, dependiendo la dirección de flujo de la
polaridad del voltaje externo aplicado. Cuando el voltaje es más positivo en
MT2, la corriente fluye de MT2 a MT1 en caso contrario fluye de MT1 a MT2.
En ambos casos el triac se comporta como un interruptor cerrado. Cuando el
triac deja de conducir no puede fluir corriente entre las terminales principales
sin importar la polaridad del voltaje externo aplicado por tanto actúa como un
interruptor abierto.
Los triac's son fabricados para trabajar a frecuencias bajas, los fabricados para
trabajar a frecuencias medias son denominados alternistores En la figura 1 se
muestra el símbolo esquemático e identificación de las terminales de un triac, la
nomenclatura Ánodo 2 (A2) y Ánodo 1 (A 1) pueden ser reemplazados por
Terminal Principal 2 (MT2) y Terminal Principal 1 (MT1) respectivamente.
El Triac actúa como dos rectificadores controlados de silicio (SCR) en paralelo
como se muestra en la figura 2 siguiente este dispositivo es equivalente a dos
latchs
Tennhlal Principal2
Temünal Principall
FIGURA No 4.4 Forma equivalente del Triac con 2 Scr's
La relación en el circuito entre la fuente de voltaje, el triac y la carga se
representa en la figura 4. La corriente promedio entregada a la carga puede
variarse alterando la cantidad de tiempo por ciclo que el triac permanece en el
estado encendido. Si permanece una parte pequeña del tiempo en el estado
encendido, el flujo de corriente promedio a través de muchos ciclos será
pequeño, en cambio si permanece durante una parte grande del ciclo de
tiempo encendido, la corriente promedio será alta.
59
Fuente ~
de ca
-
Cirtuito de
control de
compuerta
FIGURA N°4.5 Circuito básico de disparo del Triac.
Un triac no está limitado a 180 de conducción por ciclo. Con un arreglo
adecuado del disparador, puede conducir durante el total de los 360 del ciclo.
Por tanto proporciona control de corriente de onda completa, en lugar del
control de media onda que se logra con un SCR.
Las formas de onda de los triacs son muy parecidas a las formas de onda de
los SCR, a excepción de que pueden dispararse durante el semiciclo negativo.
En la figura 4 se muestran las formas de onda tanto para el voltaje de carga
como para el voltaje del triac (a través de los terminales principales) para dos
condiciones diferentes.
En la figura 4.6 (a), las formas de onda muestran apagado el triac durante los
primeros 30 de cada semiciclo, durante estos 30 el triac se comporta como un
interruptor abierto, durante este tiempo el voltaje completo de línea se cae a
través
de las terminales principales del triac, sin aplicar ningún voltaje a la carga. Por
tanto no hay flujo de corriente a través del triac y la carga.
La parte del semiciclo durante la cual existe esta situación se llama ángulo de
retardo de disparo.
Después de transcurrido los 30, el triac dispara y se vuelve como un interruptor
cerrado y comienza a conducir corriente a la carga, esto lo realiza durante el
resto del semiciclo. La parte del semiciclo durante la cual el triac está
encendido se llama ángulo de conducción.
La figura 4.6 (b) muestran las mismas formas de ondas pero con ángulo de
retardo de disparo mayor.
60
Vm
- .r- :::- - - - - - - - - ./" - 1
\
1
'
\
'
\
1
\
-
-
-
-
-
1
_"'-:!- -
-
-
-
--
V carga
Voarga
- - - - - - - -, .... ~ -
- r~:
Vm
1
1
1
\
1
1
'
1
1
1
t
\
1
-·------·------"
.1
(b)
FIGURA No 4.6 Formas de onda en la carga para ángulos
de disparo de 30° y 120°
4.4
Dispositivos de disparos del Tiristor
En los circuitos de disparo del tiristor (SCR) tenemos los circuitos de disparo
por pulso, tenemos los siguientes dispositivos de disparo:
Existe una gran variedad de aplicaciones de potencia basada en los tiristores
como elementos de control. Su propiedad de conmutación de corte a
conducción y viceversa resulta muy útil cuando se desea controlar la
transferencia de potencia a una carga.
Las aplicaciones más comunes de uso doméstico son los reguladores de luz,
control de velocidad de motores, etc.
Muchos sistemas digitales controlan a otros sistemas o realizan funciones de
control tales que deben ser interconectados a una etapa de manejo de
potencia, con base en TIRISTORES (Triacs, SCR, etc.) para actuar sobre
cargas resistivas o inductivas en sistemas de iluminación, o en procesos
industriales o en control de velocidad de motores, entre otros.
61
Dispositivo:
de disparo
9
fi~ura
1
12 •.13. Cir.;:uiítl)n:guEadorde p<tenciabnsado en un SCR
1
FIGURA N°4.7 Circuito regulador de potencia, basado en un SCR
El manejo de potencia, es decir la manipulación de altas corrientes, de hasta
varios centenares de amperios, implica el tener consideraciones de seguridad
eléctrica para los operarios y de protección para el sistema digital.
Como se sabe, el Triac posee dos ánodos denominados (MT1 y MT2) y una
compuerta G.
La polaridad de la compuerta G y la polaridad del ánodo 2, se miden con
respecto al ánodo 1.
El triac puede ser disparado en cualquiera de los dos cuadrantes 1 y 111
mediante la aplicación entre los terminales de compuerta G y MT1 de un
impulso positivo o negativo. Esto le da una facilidad de empleo grande y
simplifica mucho el circuito de disparo. Veamos cuáles son los fenómenos
internos que tienen lugar en los cuatro modos posibles de disparo.
1 - El primer modo del primer cuadrante designado por 1 ( +), es aquel en que la
tensión del ánodo MT2 y la tensión de la compuerta son positivas con respecto
al ánodo MT1 y este es el modo más común (Intensidad de compuerta
entrante).
La corriente de compuerta circula internamente hasta MT1 , en parte por la
union P2N2 y en parte a través de la zona P2. Se produce la natural inyección
de electrones de N2 a P2, que es favorecida en el área próxima a la compuerta
por la caída de tensión que produce en P2 la circulación lateral de corriente de
compuerta. Esta caída de tensión se simboliza en la figura por signos + y- .
62
Parte de los electrones inyectados alcanzan por difusión la unión P2N1 que
bloquea el potencial exterior y son acelerados por ella iniciándose la
conducción.
2- El Segundo modo, del tercer cuadrante, y designado por 111(-) es aquel en
que la tensión del ánodo MT2 y la tensión de la compuerta son negativos con
respecto al ánodo MT1 (Intensidad de compuerta saliente).
Se dispara por el procedimiento de puerta remota, conduciendo las capas
P2N1P1N4.
La capa N3 inyecta electrones en P2 que hacen más conductora la unión
P2N1. La tensión positiva de T1 polariza el área próxima de la unión P2N1 más
positivamente que la próxima a la puerta. Esta polarización inyecta huecos de
P2 a N1 que alcanzan en parte la unión N1 P1 y la hacen pasar a conducción.
3 - El tercer modo del cuarto cuadrante, y designado por 1(-)es aquel en que la
tensión del ánodo MT2 es positiva con respecto al ánodo MT1 y la tensión de
disparo de la compuerta es negativa con respecto al ánodo MT1 ( Intensidad de
compuerta saliente).
El disparo es similar al de los tiristores de puerta de unión. Inicialmente
conduce la estructura auxiliar P1 N1 P2N3 y luego la principal P1 N1 P2N2.
El disparo de la primera se produce como en un tiristor normal actuando T1 de
puerta y P de cátodo. Toda la estructura auxiliar se pone a la tensión positiva
de T2 y polariza fuertemente la unión P2N2 que inyecta electrones hacia el
área de potencial positivo. La unión P2N1 de la estructura principal, que
soporta la tensión
exterior, es invadida por electrones en la vecindad de la estructura auxiliar,
entrando en conducción.
4- El cuarto modo del Segundo cuadrante y designado por 111(+) es aquel en
que la tensión del ánodo T2 es negativa con respecto al ánodo MT1, y la
tensión de disparo de la compuerta es positiva con respecto al ánodo
MT1 (Intensidad de compuerta entrante).
El disparo tiene lugar por el procedimiento llamado de puerta remota. Entra en
conducción la estructura P2N1 P1 N4.
La inyección de N2 a P2 es igual a la descrita en el modo 1(+). Los que
alcanzan por difusión la unión P2N1 son absorbido por su potencial de unión,
haciéndose más conductora. El potencial positivo de puerta polariza más
?-''
63
positivamente el área de unión P2N1 próxima a ella que la próxima a T1,
provocándose una inyección de huecos desde P2 a N1 que alcanza en parte la
unión N1 P1 encargada de bloquear la tensión exterior y se produce la entrada
en conducción.
El estado 1(+), seguido de 111(-) es aquel en que la corriente de compuerta
necesaria para el disparo es mínima. En el resto de los estados es necesaria
una corriente de disparo mayor. El modo 111(+) es el de disparo más difícil y
debe evitarse su empleo en lo posible.
En general, la corriente de encendido de la compuerta, dada por el fabricante,
asegura el disparo en todos los estados.
64
CAPITULO V
RECTIFICADORES
CONTROLADOS,
CON
CARGA:
R,
RL,RLE:
SIMULACION
5.1 Rectificador Monofásico semicontrolado
Objetivos:
a. Con este informe previo se busca conocimientos previos para el correcto
entendimiento de un rectificador monofásico semicontrolado.
b. Identificar el
rectificador tipo
puente
monofásico
semicontrolado
simétrico.
5.2 Marco teórico:
Los Rectificadores semicontrolados son un tipo de convertidor de un sólo
cuadrante y tiene una misma polaridad de voltaje y de corriente de salida.
Emplean en sus configuraciones ramas rectificadoras con, cada una de ellas,
un diodo y un tiristor. Estos convertidores no necesitarán, por lo tanto, de doble
encendido en los tiristores, como ocurre en los rectificadores controlados,
dando una característica de salida con más ondulación que sus equivalentes
montajes a tiristores.
5.3 Rectificacion Semicontrolada
Los montajes semicontrolados están formados por q diodos y q tiristores.
Normalmente los tiristores se conectan con los cátodos comunes y los diodos
con los ánodos comunes. Estos rectificadores no pueden funcionar como
inversores no autónomos ya que la tensión media de salida siempre es positiva
Existen intervalos en los que la tensión instantánea de salida se hace nula, al
conducir un tiristor y un diodo de una misma fase. Las ventajas de este
rectificador son su sencillez en cuanto a los circuitos de control y mando, y una
mejora del factor de potencia con respecto a los circuitos totalmente
controlados.
En la figura 4 se puede observar la tensión de salida y la tensión de red en un
rectificador monofásico, con a=45° para carga resistiva o inductiva:
65
D2
FIGURA No 5.1 Rectificador semicontrolado
Vcarga
dispero=45"
OOV
FIGURA No 5.2 Formas de onda a la entrada y salida
del rectificador semicontrolado
Tensión de red y de salida de un rectificador semicontrolado
EQUIPOS Y MATERIALES.- tenemos los siguientes:
9
_,-7-
~..
---
f{}
,
+~
1
',
___ +.-
'
'
1
',
'
1:
1O resistencias de 1/2 W: 2x22!l,
BJT ( NPN)
FIGURA N° 5.3
2x100!l,
2x1.5K!l,
2x4.7K!l,
2x10K!l (al 5% de tolerancia)
FIGURA N° 5.4
~6
Un Osciloscopio
Un generador de audio
FIGURA No 5.5
2
FIGURA N° 5.6
Cables delgados
Fuentes OC regulables O - 15 V
FIGURA No 5.8
FIGURA No 5. 7
• ::::: ::::: :::::
~:;:;
::::: ::::: :;::: ;¡ ::: ::::: :::::
;~~~~~} H~H~~~ ~~~~~ ~1~ ~ ~ ~ ~ ~ i~~ ~ ~ ~ ~ ~ ~ ~ ~ ~ i;~} ~ ~ ~ ~ l~ ~ ~ ~ ~~I~ ~ ~~I~j ~~
1
Un multímetro
Protoboards
FIGURA No 5.9
FIGURA No 5.10
Procedimiento:
Para el presente laboratorio procedemos a armar el circuito de disparo para los
SCR, que consta de un LM741 (4 opam's) resistencias de Resistencias de
lOkn.. lOOkn /i7kn 2.2kn 1/2V1l, diodo de 12vx400mv, potenciómetro de 10k y
un condensador de 1Onf.
a
67
5.4 Circuito de disparo.-Diseño en Multisim
vee
U4
V1
+
"'-
XSCl.
R1
10.01<0
12Vpk
OOHz
G1
R3
f1"
LM741CH
1001<0
R2
10.01<0
vcc
U1
G2
LM741CH
FIGURA No 5.11 Salidas g1 y g2 para el disparo
FIGURA No 5.12 Formas de onda del circuito de disparo
p
68
02
BT15 500R
V2
X1
12\/_10W
FIGURA No 5.13 Circuito rectificador semicontrolado con carla RL
·VCC· ·
.. ::tW
.... · R4 ....
·· ·
R1ó: .. ·::: · · · · ·
.~:1m::
2.2k0 : : : : : : : : : : .
...'
...........
. . . 'X'( . . . . . . .
~2o\¡)S:OW:
... ........ .
.. .. .. .. .. .. .. . . .. .. .. . .. .. . . .. .. . . . .. . . . . .. ....._
__..
____ _____, ........... ..
'
FIGURA No 5.14 Circuito completo del rectificador semicontrolado
FIGURA No 5.15 Formas de onda en la salida del rectificador semicontrolado
{P70
CAPITULO VI
TRANSISTORES DE POTENCIA
6.1 Introducción
El transistor es un dispositivo electrónico semiconductor que cumple funciones
de amplificador, oscilador, conmutador o rectificador. El término "transistor" es
la contracción en inglés de transfer resistor ("resistencia de transferencia").
Actualmente se los encuentra prácticamente en todos los enseres domésticos
de uso diario: radios, televisores, grabadoras, reproductores de audio y vídeo,
hornos de microondas, lavadoras, automóviles, equipos de refrigeración,
alarmas, relojes de cuarzo, computadoras, calculadoras, impresoras, lámparas
fluorescentes, equipos de rayos X, tomógrafos, ecógrafos, reproductores mp3,
celulares, etc.
Vienen a sustituir a las antiguas válvulas termoiónicas de tres electrodos o
tríodo, el transistor bipolar fue inventado en los Laboratorios Bell de EE. UU. En
diciembre de 1947 por John Bardeen, Walter Houser Brattain y William
Bradford Shockley, quienes fueron galardonados con el Premio Nobel de Física
en 1956. Gracias a ellos fue posible la construcción de receptores de radio
portátiles llamados comúnmente "transistores", televisores que se encendían
en un par de segundos, televisores en color. Antes de aparecer los transistores,
los aparatos a válvulas tenían que trabajar con tensiones bastante altas,
tardaban más de 30 segundos en empezar a funcionar, y en ningún caso
podían funcionar a pilas, debido al gran consumo que tenían.
El transistor consta de un sustrato (usualmente silicio) y tres partes dopadas
artificialmente (contaminadas con
materiales específicos en cantidades
específicos) que forman dos uniones bipolares, el emisor que emite portadores,
el colector que los recibe o recolecta y la tercera, que está intercalada entre las
dos primeras, modula el paso de dichos portadores (base). A diferencia de las
válvulas, el transistor es un dispositivo controlado por corriente y del que se
obtiene corriente amplificada. En el diseño de circuitos a los transistores se les
considera un elemento activo, a diferencia de los resistores, capacitores e
inductores que son elementos pasivos. Su funcionamiento sólo puede
explicarse mediante mecánica cuántica. De manera simplificada, la
cor~te
~1
que circula por el "colector" es función amplificada de la que se inyecta en el
"emisor", pero el transistor sólo gradúa la corriente que circula a través
de sí mismo, si desde una fuente de corriente continua se alimenta la "base"
para que circule la carga por el "colector", según el tipo de circuito que se
utilice. El factor de amplificación logrado entre corriente de base y corriente de
colector, se denomina Beta del transistor.
Con el desarrollo tecnológico y evolución de la electrónica, la capacidad de los
dispositivos semiconductores para soportar cada vez mayores niveles de
tensión y corriente ha permitido su uso en aplicaciones de potencia. Es así
como actualmente los transistores son empleados en convertidores estáticos
de potencia, principalmente Inversores.
FIGURA No 6.1 Algunos transistores de potencia
El funcionamiento y utilización de los transistores de potencia es idéntico al de
los transistores normales, teniendo como características especiales las altas
tensiones e intensidades que tienen que soportar y, por tanto, las altas
potencias a disipar.
Existen tres tipos de transistores de potencia:
•
bipolar.
•
unipolar o FET (Transistor de Efecto de Campo).
•
IGBT.
TABLA N° 1
PARAMETROS DE LOS TRANSISTORES DE POTENCIA
Parámetros
MOS
Impedancia de entrada
Alta (1010 ohmios) Media (104 ohmios)
Ganancia en corriente
Alta (107)
Media (10-100)
Resistencia ON (saturación)
Media 1 alta
Baja
Resistencia OFF (corte)
Alta
Alta
Voltaje aplicable
Alto ( 1000 V)
Alto ( 1200 V)
Bipolar
Máxima temperatura de operación Alta (200°C)
Media (150°C)
Frecuencia de trabajo
Alta (1 00-500 Khz)
Baja (10-80Khz)
Coste
Alto
Medio
El IGBT ofrece a los usuarios las ventajas de entrada MOS, más la capacidad
de carga en corriente de los transistores bipolares:
•
Trabaja con tensión.
•
Tiempos de conmutación bajos.
•
Disipación mucho mayor (como los bipolares).
Nos interesa que el transistor se parezca, lo más posible, a un elemento ideal:
•
Pequeñas fugas.
•
Alta potencia.
•
Bajos tiempos de respuesta (ton, toff), para conseguir una alta
frecuencia de funcionamiento.
•
Alta
concentración
de
intensidad
por unidad de
superficie
del
semiconductor.
•
Que el efecto avalancha se produzca a un valor elevado (VCE máxima
elevada).
•
Una
Que no se produzcan puntos calientes (grandes di/dt).
limitación
importante
de
todos
los
dispositivos
de
potencia
y
concretamente de los transistores bipolares, es que el paso de bloqueo a
conducción y viceversa no se hace instantáneamente, sino que siempre hay un
/¿
retardo (ton, toff). Las causas fundamentales de estos retardos son las
capacidades asociadas a las uniones colector- base y base - emisor y los
tiempos de difusión y recombinación de los portadores.
6.2 Principios básicos de funcionamiento
La diferencia entre un transistor bipolar y un transistor unipolar o FET es el
modo de actuación sobre el terminal de control. En el transistor bipolar hay que
inyectar una corriente de base para regular la corriente de colector, mientras
que en el FET el control se hace mediante la aplicación de una tensión entre
puerta y fuente. Esta diferencia viene determinada por la estructura interna de
ambos dispositivos, que son substancialmente distintas.
Es una característica común, sin embargo, el hecho de que la potencia que
consume el terminal de control (base o puerta) es siempre más pequeña que la
potencia manejada en los otros dos terminales.
En resumen, destacamos tres cosas fundamentales:
•
En un transistor bipolar ls controla la magnitud de le.
•
En un FET, la tensión VGs controla la corriente 10 .
•
En ambos casos, con una potencia pequeña puede controlarse otra
bastante mayor.
Tiempos de conmutación
p
i
V
....................
FIGURA No 6.2 Tiempo de conmutación del BJT
Cuando el transistor está en saturación o en corte las pérdidas son
despreciables. Pero si tenemos en cuenta los efectos de retardo de
conmutación, al cambiar de un estado a otro se produce un pico de potencia
disipada, ya que en esos instantes el producto le x VeE va a tener un valor
apreciable, por lo que la potencia media de pérdidas en el transistor va a ser
mayor. Estas pérdidas aumentan con la frecuencia de trabajo, debido
a~
74
aumentar ésta, también lo hace eÍ numero de Veces que se produce el paso de
un estado a otro.
lB
Podremos
2
2
distinguir
entre
tiempo
de
excitación o encendido (ton) y tiempo de
apagado (toff). A su vez, cada uno de estos
lB!
ot--+-------1t-----=;¡;¡¡¡ooo-.....,. tiempos se puede dividir en otros dos.
-IB2
Tiempo de retardo (Delay Time, td): Es el
tiempo que transcurre desde el instante en
le
que se aplica la señal de entrada en el
1.0
0.9
dispositivo conmutador, hasta que la señal
de salida alcanza el 10% de su valor final.
Tiempo de subida (Rise time, tr): Tiempo
0.1
o
t
que
emplea
la
señal
de
salida
en
evolucionar entre el 10% y el 90% de su
valor final.
FIGURA No 6.3 Tiempo de excitación, retardo y subida
Tiempo de almacenamiento (Storage time, ts): Tiempo que transcurre desde
que se quita la excitación de entrada y el instante en que la señal de salida baja
al 90% de su valor final.
Tiempo de caída (Fall time, tf): Tiempo que emplea la señal de salida en
evolucionar entre el 90% y el 1O% de su valor final.
Por tanto, se pueden definir las siguientes relaciones :
= td +t
ttl'.tf ~ tJ +t,
ttl''/1
7
Es de hacer notar el hecho de que el tiempo de apagado (toff) será siempre
mayor que el tiempo de encendido (ton).
.ftiZ
75
Los tiempos de encendido (ton) y apagado (toff) limitan la frecuencia máxima a
la cual puede conmutar el transistor:
Otros parámetros importantes
FIGURA No 6.4 Parámetros importantes en un señal
Corriente media: es el valor medio de la corriente que puede circular por un
terminal (ej. lcAv. corriente media por el colector).
Corriente máxima: es la máxima corriente admisible de colector (lcM) o de
drenador (IoM). Con este valor se determina la máxima disipación de potencia
del dispositivo.
V eso: tensión entre los terminales colector y base cuando el emisor está en
circuito abierto.
V Eso: tensión entre los terminales emisor y base con el colector en circuito
abierto.
Tensión máxima: es la máxima tensión aplicable entre dos terminales del
dispositivo (colector y emisor con la base abierta en los bipolares, drenador y
fuente en los FET).
Estado de
saturación:
queda
determinado
por una
caída
de tensión
prácticamente constante. V cE entre colector y emisor en el bipolar y resistencia
de conducción Roson en el FET. Este valor, junto con el de corriente máxima,
determina la potencia máxima de disipación en saturación.
~76
Relación corriente de salida - control de entrada:
hFE
para el transistor bipolar
(ganancia estática de corriente) y gds para el FET (transconductancia en
directa).
6.3 Modos de trabajo del transistor bipolar
Existen cuatro condiciones de polarización posibles. Dependiendo del sentido o
signo de los voltajes de polarización en cada una de las uniones del transistor
pueden ser:
Región activa
directa
Región de
saturación
Ves
Región de
corte
Región activa
inversa
FIGURA No 6.5 Modos de trabajo del transistor Bipolar
•
Región activa directa: Corresponde a una polarización directa de la
unión emisor - base y a una polarización inversa de la unión colector base. Esta es la región de operación normal del transistor para
amplificación.
•
Región activa inversa: Corresponde a una polarización inversa de la
unión emisor - base y a una polarización directa de la unión colector base. Esta región es usada raramente.
•
Región de corte: Corresponde a una polarización inversa de ambas
uniones. La operación en ésta región corresponde a aplicaciones de
conmutación en el modo apagado, pues el transistor actúa como un
interruptor abierto (IC=O).
L
77
•
Región de saturación: Corresponde a una polarización directa de ambas
uniones. La operación en esta región corresponde a aplicaciones de
conmutación en el modo encendido, pues el transistor actúa como un
interruptor cerrado (VCE = 0).
6.4 Avalancha secundaria: Curvas SOA.
le:
Segunda rupt.Jra
, Límite de segunda ruptura
'
I¡;;= O
V(.B!Q::EV
V C'.l
...v(BR)CBo
FIGURA No 6.6 Curvas SOA
Si se sobrepasa la máxima tensión permitida entre colector y base con el
emisor abierto (Vcso), o la tensión máxima permitida entre colector y emisor
con la base abierta (VcEo), la unión colector - base polarizada en inverso entra
en un proceso de ruptura similar al de cualquier diodo, denominado avalancha
primaria.
Sin embargo, puede darse un caso de avalancha cuando estemos trabajando
con tensiones por debajo de los límites anteriores debido a la aparición de
puntos calientes (focalización de la intensidad de base), que se produce
cuando tenemos polarizada la unión base - emisor en directo. En efecto, con
dicha polarización se crea un campo magnético transversal en la zona de base
que reduce el paso de portadores minoritarios a una pequeña zona del
dispositivo (anillo circular).La densidad de potencia que se concentra en dicha
zona es proporcional al grado de polarización de la base, a la corriente de
colector y a la VcE. y alcanzando cierto valor, se produce en los puntos
calientes un fenómeno degenerativo con el consiguiente aumento de las
y
78
pérdidas y de la temperatura. A este fenómeno, con efectos catastróficos en la
mayor parte de los casos, se le conoce con el nombre de avalancha secundaria
(o también segunda ruptura).
El efecto que produce la avalancha secundaria sobre las curvas de salida del
transistor es producir unos codos bruscos que desvían la curva de la situación
prevista (ver gráfica anterior).
El transistor puede funcionar por encima de la zona límite de la avalancha
secundaria durante cortos intervalos de tiempo sin que se destruya. Para ello el
fabricante suministra unas curvas límites en la zona activa con los tiempos
límites de trabajo, conocidas como curvas FBSOA.
Limiii.JIGI' ....a.n.w.
·~
,_----------------~~v·~
V cm
.Area defi¡.Mcionamiel'lto 3egw-o omrégimen confii1Uoy pul:sQnfe
FIGURA No 6. 7 Área de funcionamiento seguro
Podemos ver como existe una curva para corriente continua y una serie de
curvas para corriente pulsante, cada una de las cuales es para un ciclo
concreto.
Todo lo descrito anteriormente se produce para el ton del dispositivo. Durante
el toff, con polarización inversa de la unión base - emisor se produce la
focalización de la corriente en el centro de la pastilla de Si, en un área más
pequeña que en polarización directa, por lo que la avalancha puede producirse
con niveles más bajos de energía. Los límites de le y VcE durante el toff vienen
reflejado en las curvas RBSOA dadas por el fabricante.
79
Efecto producido por carga inductiva. Protecciones.
Las cargas inductivas someten a los transistores a las condiciones de trabajo
más desfavorables dentro de la zona activa.
V ce
C: arga inductiva
B
'-........._./.,.,-
le
1es r:·.~-----~
...
D
·-.r-/
/~··· ...
/
C: arga resistiva
)
· ..
·•.
A
Cli:
C'ircuito con carfi{a imitl.ctiva
CaracfeTistica de tram¡ferencia para el
fl'nYJ.~i.~tn'l'
,..,., r.n,.,m!Jfnr.ilm r.n,., r.n'l' 8" ;,.,ti!Jr.ffvm
FIGURA No 6.8
En el diagrama superior se han representado los diferentes puntos idealizados
de funcionamiento del transistor en corte y saturación. Para una carga resistiva,
el transistor pasará de corte a saturación. Para una carga resistiva, el transistor
pasará de corte a saturación por la recta que va desde A hasta C, y de
saturación a corte desde Ca A. Sin embargo, con una carga inductiva como en
el circuito anterior el transistor pasa a saturación recorriendo la curva ABC,
mientras que el paso a corte lo hace por el tramo COA. Puede verse que este
último paso lo hace después de una profunda incursión en la zona activa que
podría fácilmente sobrepasar el límite de avalancha secundaria, con valor VCE
muy superior al valor de la fuente (Vcc.).
Para proteger al transistor y evitar su degradación se utilizan en la práctica
varios circuitos, que se muestran a continuación:
Vcc
Vcc
A)
B)
V ce
FIGURA No 6.1 O Circuitos de protección al BJT
{iJ
80
a) Diodo Zener en paralelo con el transistor (la tensión nominal zener ha de ser
superior a la tensión de la fuente Vcc.).
b) Diodo en anti paralelo con la carga RL.
e) Red RC polarizada en paralelo con el transistor (red snubber).
Las dos primeras limitan la tensión en el transistor durante el paso de
saturación a corte, proporcionando a través de los diodos un camino para la
circulación de la intensidad inductiva de la carga.
En la tercera protección, al cortarse el transistor la intensidad inductiva sigue
pasando por el diodo y por el condensador CS, el cual tiende a cargarse a una
tensión Vcc. Diseñando adecuadamente la red RC se consigue que la tensión
en el transistor durante la conmutación sea inferior a la de la fuente, alejándose
su funcionamiento de los límites por disipación y por avalancha secundaria.
Cuando el transistor pasa a saturación el condensador se descarga a través de
RS.
FIGURA No 6.11 Efecto producido por la red snubber
El efecto producido al incorporar la red snubber es la que se puede apreciar en
la figura adjunta, donde vemos que con esta red, el paso de saturación (punto
A) a corte (punto B) se produce de forma más directa y sin alcanzar valores de
V cE superiores a la fuente Vcc.
Para el cálculo de CS podemos suponer, despreciando las pérdidas, que la
energía almacenada en la bobina L antes del bloqueo debe haberse transferido
a CS cuando la intensidad de colector se anule. Por tanto:
21 X L X 1lC(liB) = 21 e
X
S X
l
V"ce
81
De donde:
l
Cs
=
L X 1C'( Jlt)
2
Vce
Para calcular el valor de RS hemos de tener en cuenta que el condensador ha
de estar descargado totalmente en el siguiente proceso de bloqueo, por lo que
la constante de tiempo de RS y CS ha de ser menor (por ejemplo una quinta
parte) que el tiempo que permanece en saturación el transistor:
r.s= RsX e.s.S
tiempo con BIT saturado
5
Cálculo de potencias disipadas en conmutación con carga resistiva
I CIDIIK
p
p
IDliK
00
000000
Oooo¡
o
o
000:0°oooooo
000000
OOOooO
000000
0~0000
:
FIGURA No 6012 Tiempos de conmutación, para una carga resistiva
La gráfica superior muestra las señales idealizadas de los tiempos de
conmutación (ton y toff) para el caso de una carga resistiva.
Supongamos el momento origen en el comienzo del tiempo de subida (tr) de la
corriente de colector. En estas condiciones (O t tr) tendremos:
ic =le••
x(~J
Donde le más vale:
82
También tenemos que la tensión colector- emisor viene dada como:
VcE
= Vcc- R xic
Sustituyendo, tendremos que:
(.!...) =V:ce x (1- ..!_)
t
17. = V: - R x Vce x
c:a
ce
R
tr
Nosotros
asumiremos
que
la
VcE en
r
saturación
es
despreciable
en
comparación con Vcc.
Así, la potencia instantánea por el transistor durante este intervalo viene dada
por:
La energía, Wr, disipada en el transistor durante el tiempo de subida está dada
por la integral de la potencia durante el intervalo del tiempo de caída, con el
resultado:
De forma similar, la energía (Wf) disipada en el transistor durante el tiempo de
caída, viene dado como:
La potencia media resultante dependerá de la frecuencia con que se efectúe la
conmutación:
PAJf
=f
X(
w; + w,)
Un último paso es considerar tr despreciable frente a tf, con lo que no
cometeríamos un error apreciable si finalmente dejamos la potencia media, tras
sustituir, como:
.#
83
Cálculo de potencias disipadas en conmutación con carga inductiva
Ic(t)
Ic(sal) ....... - ............. :
v c:t<t)
V
t----+--~
V Cl!l',s'lt .•..........;......... ;... .
~
) p
pmx ···········~·········:
.
...
...
.
........
...
:
.. =.. .,;..
..
FIGURA No 6.13 Tiempos de conmutación, para una carga inductiva.
Arriba podemos ver la gráfica de la ic (t), VcE (t) y p (t) para carga inductiva. La
energía perdida durante en ton viene dada por la ecuación:
1
w;•• = 2 X V X
1(!(,111) X (4
+t2)
Durante el tiempo de conducción (t5) la energía perdida es despreciable,
puesto que V cE es de un valor ínfimo durante este tramo.
Durante el toff, la energía de pérdidas en el transistor vendrá dada por la
ecuación:
La potencia media de pérdidas durante la conmutación será por tanto:
Pror(AV) =
wr... + Vf;.,
T
-
f
X
cw;•• +w~,)
Si lo que queremos es la potencia media total disipada por el transistor en todo
el periodo debemos multiplicar la frecuencia con la sumatoria de pérdidas a lo
largo del periodo (conmutación + conducción). La energía de pérdidas en
conducción viene como:
fl
84
Ataque y protección del transistor de potencia
Como hemos visto anteriormente, los tiempos de conmutación limitan el
funcionamiento del transistor, por lo que nos interesaría reducir su efecto en la
medida de lo posible.
t
FIGURA No 6.14 Señal de base modificada
Los tiempos de conmutación pueden ser reducidos mediante una modificación
en la señal de base, tal y como se muestra en la figura anterior.
Puede verse como el semiciclo positivo está formado por un tramo de mayor
amplitud que ayude al transistor a pasar a saturación (y por tanto reduce el ton)
y uno de amplitud suficiente para mantener saturado el transistor (de este
modo la potencia disipada no será excesiva y el tiempo de almacenamiento no
aumentará). El otro semiciclo comienza con un valor negativo que disminuye el
toff, y una vez que el transistor está en corte, se hace cero para evitar pérdidas
de potencia.
En consecuencia, si queremos que un transistor que actúa en conmutación lo
haga lo más rápidamente posible y con menores pérdidas, lo ideal sería atacar
la base del dispositivo con una señal como el de la figura anterior. Para esto se
puede emplear el circuito de la figura siguiente.
b
85
Vce
FIGURA No 6.15 Circuito con BJT como conmutador
En estas condiciones, la intensidad de base aplicada tendrá la forma indicada a
continuación:
t
FIGURA No 6.16 Señal aplicada a la base
Durante el semiperiodo t1, la tensión de entrada (Ve) se mantiene a un valor Ve
(máx.). En estas condiciones la VsE es de unos 0.7 v y el condensador C se
carga a una tensión Ve de valor:
Debido a que las resistencias R1 y R2 actúan como un divisor de tensión.
La cte. de tiempo con que se cargará el condensador será aproximadamente
de:
p
86
Con el condensador ya cargado a Ve, la intensidad de base se estabiliza a un
valor ls que vale:
En el instante en que la tensión de entrada pasa a valer -Ve (min), tenemos el
condensador cargado a Ve, y la VsE=O.? v. Ambos valores se suman a la
tensión de entrada, lo que produce el pico negativo de intensidad ls (mín.):
A partir de ese instante el condensador se descarga a través de R2 con una
constante de tiempo de valor R2C.
Para que todo lo anterior sea realmente efectivo, debe cumplirse que:
5 X r-¡,:5; t¡
5xr-2 ,:5;t:¡
Con esto nos aseguramos que el condensador está cargado cuando
apliquemos la señal negativa. Así, obtendremos finalmente una frecuencia
máxima de funcionamiento:
f ..
Q](=
1
t 1 +.t2
1
5x-r1 +5x-r2
0.2
11.+12
87
Un circuito más serio es el de Control Anti saturación:
V ce
FIGURA No 6.17 Circuito antisaturación para el BJT
El tiempo de saturación (ts) será proporcional a la intensidad de base, y
mediante una suave saturación lograremos reducir ts:
- Vcc-Va
l eRe
Inicialmente tenemos que:
En estas condiciones conduce 02, con lo que la intensidad de colector pasa a
tener un valor:
Si imponemos como condición que la tensión de codo del diodo 01 se mayor
que la del diodo 02, obtendremos que le sea mayor que IL:
lc=/3xlA
/)X lB X Re> VCB- V&'- V,:n + v.,.2
88
El Transistor IGBT
e
E
FIGURA No 6.18 Simbología IGBT
El transistor bipolar de puerta aislada (IGBT, del inglés lnsulated Gafe Bipolar
Transistor) es un dispositivo semiconductor que generalmente se aplica como
interruptor controlado_en circuitos de electrónica de potencia. Este dispositivo
posee la características de las señales de puerta de los transistores de efecto
campo con la capacidad de alta corriente y bajo voltaje de saturación
del transistor bipolar, combinando una puerta aislada FET para la entrada de
control y un transistor bipolar como interruptor en un solo dispositivo. El circuito
de excitación del IGBT es como el del MOSFET, mientras que las
características de conducción son como las del BJT.
l.
Aplicaciones
Aplicación De Un Transistor De Potencia, En Este Caso Transistor Bipolar.
FIGURA No 6.19 Circuito de aplicación con BJT
Cuando la base de un transistor NPN se conecta a tierra (voltaje cero) no
circula corriente del emisor al colector (el transistor está en posición de "fuera").
Si la base se encuentra puenteada en el sentido directo con voltaje de al
menos de 0.66 volts, una corriente circula del emisor al colector (el transistor
fosg
está en posición de "dentro"). Si el transistor opera solo en estas dos formas,
se dice que entonces funciona como un switch.
Cuando la base del transistor se puentea en el sentido directo, la corriente
emisor - colector producirá variaciones muy pequeñas en la corriente de la
base, en estas condiciones se dice que el transistor opera como un
amplificador. Esto se aplica a un transistor en el que el emisor es la conexión a
tierra, tanto para la entrada como para la salida y se llama "circuito emisor
común".
Los transistores IGBT han permitido desarrollos que no habían sido viables
hasta entonces, en particular en los Variadores de frecuencia así como en las
aplicaciones en eléctrica convertidores de potencia que nos acompañan cada
día y por todas partes, sin que seamos particularmente conscientes de eso:
automóvil, tren, avión, barco, ascensor, electrodomésticos, Sistemas de
Alimentación Ininterrumpida o SAl (en Inglés UPS), etc.
11.
Simulaciones
Fuente de Alimentación Simétrica Regulada y Variable.
Una de las tantas aplicaciones de los transistores de potencia es en las fuentes
simétricas
•
~
•
•
•
...
i
,..
,._
-
...
•
a
10
_.
+
.
•
~
•
·•
_.
r
•
..
•
.,...
..
'
...
-
....
~
... 10
-
'
• • ·- · o1 · · ·R5
1
; - t~~ ·-· !
"'
•1CX.1•
.
1
R3
1
1
1
'
•
R1
R7
~.1(.1•
• TR1
'
~-'-1------r-+---+---------+
]
'
'
.
R8
~....:.
t1 .' -· --"
1.1
::
:.:-~ . i=-·~-::t.:·_.:::- ... :. .. ~!~r••~ _:,l ....... :,.:~· ..
•
.. -
..
!•T~
. . . . - :>"TIJ<.l ..
FIGURA No 6.20 Fuente de alimentación simétrica regulada y variable
#90
CAPITULO VIl
INVERSORES U ONDULADORES, MONOFASICOS Y TRIFASICOS,
SIMULACION
7.1
Introducción
La función de un inversor es cambiar un voltaje de entrada de corriente
continua a un voltaje simétrico de salida de corriente alterna, con la magnitud y
frecuencia deseada por el usuario o el diseñador. Los inversores se utilizan en
una gran variedad de aplicaciones, desde pequeñas fuentes de alimentación
para computadoras, hasta aplicaciones industriales para controlar altapotencia. Los inversores también se utilizan para convertir la corriente continua
generada por los paneles solares fotovoltaicos, acumuladores o baterías, etc.,
en corriente alterna y de esta manera poder ser inyectados en la red eléctrica o
usados en instalaciones eléctricas aisladas.
Un inversor simple consta de un oscilador que controla a un transistor, el cual
se utiliza para interrumpir la corriente entrante y generar una onda rectangular.
Esta onda rectangular alimenta a un transformador que suaviza su forma,
haciéndola parecer un poco más una onda senoidal y produciendo el voltaje de
salida necesario. Las formas de onda de salida del voltaje de un inversor ideal
deberían ser sinusoidales. Una buena técnica para lograr esto es utilizar la
técnica de PWM logrando que la componente principal senoidal sea mucho
más grande que las armónicas superiores. Los inversores más modernos han
comenzado a utilizar formas más avanzadas de transistores o dispositivos
similares, como los tiristores, los triac o los IGBT.
Los inversores más eficientes utilizan varios artificios electrónicos para tratar de
llegar a una onda que simule razonablemente a una onda senoidal en la
entrada del transformador, en vez de depender de éste para suavizar la onda.
Se pueden clasificar en general en dos tipos: 1) inversores monofásicos e 2)
inversores trifásicos.
91
"Se pueden utilizar condensadores e inductores para suavizar el flujo de
corriente desde y hacia el transformador.
7.2
Inversor en puente completo.
Un puente completo está formado por dos medios puentes y será utilizado para
rangos de potencias superiores (Fig. 9). Con la misma tensión de entrada que
en el caso anterior (medio puente), la tensión máxima a la salida del inversor
será el doble.
En función del método de control seleccionado, los inversores modulados
monofásicos podrán clasificarse en inversores con conmutación bipolar e
inversores con conmutación unipolar.
Funcionamiento Bipolar
En este tipo de funcionamiento los interruptores del inversor tendrán solamente
dos posibles combinaciones:
T A+ y T 8- cerrados y sus complementarios abiertos. Por tanto la tensión VAB
tendrá un valor positivo e igual a VD.
T A- y T B+ cerrados y sus complementarios abiertos. Por tanto la tensión VAB
tendrá un valor negativo e igual a VD.
FIGURA No 7.1 Inversor en puente completo
?
92
7.3
Inversores trifásicos
Los inversores trifásicos se utilizan en aplicaciones de mayor potencia,
pudiendo estar formados por tres inversores monofásicos independientes
conectados a la misma fuente, lo cual se muestra en la siguiente figura. La
única exigencia será el desfase de 120° de las señales de disparo de cada
inversor con respecto a los demás, para conseguir una tensión equilibrada a la
salida.
- v.
+
A
~
lnv.erter
.....J
-
1
l·~ D}
18
lnverter
2
.....
f·.. ~
E (
,J
e
'---
lnverter
3
l•a
F
FIGURA No 7.2 Inversor trifásico con inversores monofásicos
Las tres señales alternas que obtienen de manera independiente en cada
inversor, pueden ser conectadas al primario de un transformador trifásico
dejando la conexión de sus secundarios en configuración delta o estrella en
función de la carga. Este montaje requiere tres transformadores monofásicos,
doce transistores y doce diodos. Si las tensiones de salida de los inversores
monofásicos no están perfectamente equilibradas en magnitud y fase, la salida
del sistema estará descompensada. Se puede obtener otra configuración de
inversor, en la que se reduzcan el número de semiconductores a utilizar, esta
concepción se muestra a continuación.
93
a
io,
io,
D,
o,
b
1'
b
e
i,t
+
-
le
A
e
(a) Conexión en
triángulo
(b) Conexión en
estrelila
D,
D•
;o•
ÍD,
El funcionamiento de este inversor trifásico se caracteriza por dos modos de
funcionamiento distintos en función del intervalo de conducción de cada
interruptor.
a. 180° grados de conducción: Cada interruptor conduce 180°, de forma
que siempre existirán tres transistores conduciendo simultáneamente.
Los terminales a, b y e estarán o conectados al borne positivo de la
batería de entrada o al terminal negativo de la misma. De la secuencia
de disparo (123, 234, 345, 456, 561, ... ) se obtendrán 6 intervalos de
funcionamiento distintos, agrupados en 3 modos:
Modo 1:
O<
wt
-
<
ft/3
-
- vs
~
Rtrq
3·R'
= R +-R2 =-2
_2·~
11.----Rsq
3·R
R V.S
•
va~~a =ven =r.·-=3
lz
94
Modo 2:
rr/3
< wt S
2rr:/3 ~
.
= 11 = - t2
11'
2 · tT
=i2 ·R = -3-8
G!fi.
=
3 ·R
2
b
R -~
.- =2
3
1.?'b~
1m
R',sq
R
Modo 3:
2:n:/3
<
- wt -< 'K ~ R eq
~
2·~
Req
3 ·R
3·R'
=R +-R2 = 2:-
Ia=-.-=--
v·a;m =vbfi
1.1'
en
=
= t.a ·R- =~2
3
. R. = -2·V.S
-la·
.
3
a
R
~95
~
í
1
d
¡1.t..B 1.2.f
..
1 lO
1
-if
-.r'
il
il
1
111
11
1
1
,,1
1.
1
1'!
1
_J.1__ J._-
1
1
1
1
~tínea
il1
1 IU
.
,. ttwrlillt
·~
.
-2.
1
1
1
1
1
.1
,,il
~
1
1
1
,,1
TenstiaRIMi
~·
Y 1 VI 1 1
ta.:Jil-,,11~4.111,4.511,1.1 1,2.11,2.3 ~
'1
1)'
1 IV
'~
o
Tensvo11as
di! fase.
FIGURA No 7.3 Forma de onda de salida del inversor trifásico
Caracterizar la calidad de la señal alterna obtenida podemos
expresar la tensión entre dos fases como:
V12:z, =
fli))
~ n4·~
~-~ ( (
_L
. n · cos \6) · sin n · wt +6
1
l'l.-1,3,5, ..•
Las demás tensiones se obtienen desfasando
~a=
~
_L
n-1.3,5, ...
4n ··n~ ·cos\6'
m·n) sm
. (n · (
Hrt-
Vab
120° y 240°
7rr.))
6
1.
96
fi
La tensión rms entre 2 fases se puede expresar como:
V.L
J
·'2: anta
'
= -·
2
,
1l"
i
2
V.S d(wt) =
o
2
-·V.S = 0$165 ·t'S
3
Así como la tensión rms para el armónico enésimo:
V.
~l.
4·Vs . • CIDS G'- IC)
= ,fi..
nn::
6
Dada la conexión en la carga en estrella el valor rms de la tensión de
una fase a neutro (VP) será V¡j..fj
= 0.47~.
b. 120° grados de conducción: Cada interruptor conduce 120°, de forma
que siempre existirán tres transistores conduciendo simultáneamente.
De la secuencia de disparo (12, 23, 34, 56, 61 ,... ) se obtendrán 3
intervalos de funcionamiento distintos, en un semi-ciclo de la tensión de
salida. Veamos a continuación los intervalos de funcionamiento para
cada caso:
Modo 1:
O< """i: <n/3
e
R
Modo 2:
-n;./3
< "HI·t S
2n/3
a
R
97
Modo 3:
2rr/3 :::::;; wt
<n
Va
TT
vz¡olli!
-Vs
=-V.
2 • C'llil = -2V' .an =O
a
R
b
R
Las tensiones de fase a neutro pueden ser expresadas en serie de
Fourier como:
~
Vz.,n. = -~
fi.-1:3,!;, ...
-~
2
[7!"11:)
( ·(
n ·x · cos\6 )sin.. n. wt-
Siendo las tensiones entre fases
,13
l''il;))
1
veces la fase a neutro con un
adelanto de 30°. La línea de tensión es:
= "3~n
Con un adelanto de fase de 30°, por tanto, hay un retardo de n/6 entre
vcb
el corte de Q1 y la conducción de Q4 . De esta forma, se evita que la
fuente de continua se cortocircuite al pasar de un modo de operación a
otro.
Durante cada modo de operación uno de los tres terminales está abierto
y los otros dos conectados a la fuente de continua. La tensión del
terminal abierto dependerá de las características de la carga y es
impredecible.
p
98
. •
.a,,
tl6
1
•
u
IU
2, 1
3,, 2
u
1
i
l
il
j;
11
~·:
il
3
1
1
..1
~
.
l
o
1
... "'.
1
i
lj."
~
Oj'
1
li
·1'
lit;'~:
.1
~·
o
J ..
L
1
_j_
!:
.
1
11
1
1
1
i
1
1
•
g
1
1
1
í
l
J
;
•
1
1·~
''
~
1
.
1
1
1
~
1
l
1
1
~
•
1
-
1
'
1
..,
~.-
.JI.
'lll
111
·:l
.wr
-1
1
i
1
L
t
1
•
•
W;t
.,... .
•.1
'
:1
1
1
i
·1
a.'l.
....
i..Jt
1
1
lto,,
,
1-
1
1!
,
~
~
t
't;n
1
j
1
~
~¡
•"
-·~·
CO."i'
1
~
1
•
11
Q
:1,
11
1·
ii
i
1'
11
11
li
1'
li
,,
1
~
Wt
t
•
1
i
1
cor!!d~íñll
....~
J1
1
!
i
1
1
~
1
11
1
Pcmd
'nl'!o'r~l•Or"il
1
L
'1
1
1
.
·~hr
l
1·
1
1
1
1
1
1
1
_l
j
i
í
O,
1
~
1
f
•
-
1
1
g
R
~~
• .
•1
1
1:
1
1
1
-
1
.j
•
1
~
11
L
1
L
j
1
1
•1
'
~
•
1
1
1
1
1
L
1
1
n
1
•J
f
Jt
1
1
Q
'!q
'
ñ
•
il
,j_
g
tr':
1
~
1
¡~jlj
1
_l
1
1
I(J
1
11
1
l
U't
3.2
1
2;¡
1!
1
1
1
11
1
11
.2;, 1
1
IÍ
1
1
1, G
'
11
1
p
IÍ
'
'L'r;:,>¡·.
1
i
1
1
li
Plo:ft'>'
'1
1
l
B
'!'
1
.l-
1
• -.,_ -T--·•
\J
11
11
1
il
J'
u
Vd
B, &i
~
e•
.S
11!
1
1
...i
4
1
!'
1
~
1
~-
!
~
1
l
1
:i
o
•"es
o
lf
j
¡
•
C<
;{~'4r
.1
l
V
6,.:4
1
1
q
1
~
V.r;:'O
~
•
q
_IÍ
l1
·r..,
o
1
li
1
)\;'
4. 3
.t..Jt.
11
~~
J1
i
1
1
í
1
i
l
•
~
•
3¡a-
w.
1
JI
i'
----
.JI
1
!
='~" 1'-- -
-
-
·- ·- -
-
"•
FIGURA No 7.4 Pulsos de disparo y tensión de salida
y
99
CAPITULO VIII
INVERSORES PWM, INVERSORES RESONANTES SIMULACION
8.1 Inversores modulados
En función del método de control seleccionado, los inversores modulados
monofásicos podrán clasificarse en inversores con conmutación bipolar e
inversores con conmutación unipolar.
Funcionamiento Bipolar
En este tipo de funcionamiento los interruptores del inversor tendrán solamente
dos posibles combinaciones:
T A+ y T 8- cerrados y sus complementarios abiertos. Por tanto la tensión VAB
tendrá un valor positivo e igual a VD.
T A- y T B+ cerrados y sus complementarios abiertos. Por tanto la tensión VAB
tendrá un valor negativo e igual a VD.
En esta topología no es necesario que la alimentación en continua disponga de
punto medio (0). Sin embargo, para aprovechar los resultados obtenidos en el
apartado anterior será utilizado para deducir el valor de la tensión media en un
ciclo de conmutación.
Las tensiones instantáneas en los semipuentes (VAO y VBO) son iguales pero
de signo contrario (Fig. 10), por lo que al restarlas para obtener la tensión VAB
se obtiene una tensión similar a VAO pero de valor doble.
v...o
:ru 11 rn 11!. .~~
...
FIGURA No 8.1 Forma de onda de salida del inversor PWM
~o
La tensión VAS (mostrada en la Fig. 1O) equivale a la tensión obtenida en el
medio puente "A" pero con una alimentación igual a 2VD. Por tanto, las
expresiones deducidas para el medio puente podrán ser aplicadas a esta
topología simplemente sustituyendo VD/2 por VD. El contenido armónico y la
sobremodulación serán idénticos (con la salvedad ya mencionada) que en el
medio puente.
Funcionamiento Unipolar
En el caso anterior (funcionamiento bipolar) mediante una única señal de
control (Vcontrol) se determinaban todas las señales de disparo de los cuatro
interruptores que forman el inversor en puente completo. Si la tensión de
control superaba a la triangular se cerraban T A+ y T S- y en caso contrario T
A- y T S+. En un puente con funcionamiento unipolar serán necesarias dos
señales de control VCA y VCS. Estas tensiones de control darán lugar a dos
tensiones diferentes a la salida de cada semipuente VAO y VSO. La tensión a la
salida del inversor VAS podrá calcularse al igual que en el caso anterior como
la diferencia entre las dos tensiones anteriormente mencionadas (VAS=VAOVSO).
Las tensiones de control para cada uno de los medios puentes (semipuentes)
podrán ser expresadas de forma general mediante las expresiones recogidas
en (13). La frecuencia de las dos señales de control debe ser igual para
obtener una señal a la salida de esa misma frecuencia
FIGURA No 8.2 Formas de ondas de funcionamiento unipolar
~/
101
Inversor en puente completo con control PWM Sinusoidal unipolar
DISEÑO DEL CIRCUITO:
:(V):~.:::
:· ::.:: ::
+
-~tri+····~·
: . ~~1 . . _. : . .
.
. ' : :;: : .
~..... '.'
.. .. .
V
. . . ¡...
::::::::·~:
..
•••
"
•
o
•
'
•
•
•
•
•
"
•••
,'
••
::
if:
.. ,l.
::~ ::
: :o;a:
:: 1·::
•
L'
•
•
FIGURA No 8.3. Diseño del control PWM sinusoidal unipolar
~Tll
-
Bt
1-
~
__.__ o.JTF~
:
02
U)IE
o<T..._"rt
FIGURA No 8.4 Circuito completo: Diseño unipolar
102
FIGURA No 8.5. Forma de Onda: Circuito de diseño unipolar
Inversor en puente completo con control PWM Sinusoidal bipolar
DISEÑO DEL CIRCUITO
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - - - - 1 .. ·
'"
.....
......... .
FIGURA N°8.6. Diseño del control PWM sinusoidal bipolar
103
.~
.
~-_...._
._..... .
...,~
....
1
8111
-:'--- ...
A
~
............. -.'
~
..
------,-
o
1>-~~"-'-fc
01
·ni
u••E
<TE><!>
1
1
1
·....&.-
81,
tlllll.,
<Tr!Xn
1
1
- 1
o2-
t-
FIGURA No 8. 7 Circuito completo: Diseño bipolar
FIGURA No 8.8. Forma de Onda: Circuito de diseño bipolar
~
104
CAPITULO IX
INTERRUPTORES ESTATICOS
9.1 Introducción
Estos dispositivos fueron diseñados con la finalidad de remplazar a los clásicos
interruptores de corriente mecánicos y electromecánicos. Aprovechando las
características funcionales de los tiristores y los transistores, se aplican estos
dispositivos para el uso como interruptores de corriente.
Los tiristores que pueden activarse y desactivarse en menos de unos pocos
microsegundos pueden funcionar como interruptores de acción rápida para
sustituir los interruptores automáticos mecánicos y electromecánicos. Para
aplicaciones de cd con baja potencia, los transistores de potencia también se
pueden usar como interruptores. Los interruptores estáticos tienen muchas
ventajas, como velocidades muy altas de conmutación, no tienen partes
móviles y no hay rebote en el contacto al cerrar.
Los interruptores estáticos tienen ventajas, frente a los clásicos, como ser alta
velocidad de activación y desactivación (algunos microsegundos), no tienen
partes móviles y no hay rebotes en el contacto al cerrar.
Además
de
las ventajas
mencionadas,
los
interruptores estáticos
(o
electrónicos), se los puede diseñar con determinadas funciones lógicas,
necesarias en sus aplicaciones (automatismos o mandos), como ser "retardos",
"retención", detección etc., tanto para corrientes como voltajes.
9.2 Clasificación der los Interruptores Estáticos
Los interruptores estáticos se pueden clasificar en interruptores para corriente
alterna e interruptores para corriente continua. Los interruptores de CA, pueden
ser monofásicos o trifásicos. Estos últimos también podemos clasificarlos en
asincrónicos y sincrónicos, en relación al inicio de su activación, con respecto
al cruce con cero, del voltaje de trabajo. Normalmente los interruptores de CA
tienen conmutación de línea o natural, y la velocidad de conmutación está
limitada por la frecuencia de la fuente de alimentación de CA y la velocidad de
conmutación de los tiristores.
105
Los interruptores para corriente continua, tienen conmutación forzada y la
velocidad
de
conmutación
depende
de
los tiempos
de
activación y
desactivación de los dispositivos semiconductores.
Además de las aplicaciones como interruptores estáticos, los circuitos de
tiristores (o transistores) se pueden diseñar para dar un retardo, retención y
detecciones de corrientes y voltajes altos y bajos. Los transductores para
detectar señal mecánica, eléctrica, de posición, de proximidad, etc., pueden
generar las señales de disparo o de control para los tiristores (o los
transistores).
9.3 Interruptores Estáticos de Corriente Continua
Un interruptor estático consta de uno o más elementos semiconductores que
constituyen el "contacto", y un circuito de mando que determina la posición del
contacto: abierto (los semiconductores
ofrecerán una alta impedancia de
entrada al paso de corriente) cerrado (impedancia prácticamente nula). Las
características
generales
semiconductor de
vienen
dadas
por
su
elemento
básico:
el
potencia. La principal diferencia entre los interruptores
convencionales y los estáticos radica en la forma de efectuar el corte y el
restablecimiento del circuito eléctrico. Las ventajas de la inserción de
una
impedancia alta y no de un corte real del circuito eléctrico ya fueron detalladas
en el tema anterior.
Veamos a continuación los interruptores estáticos de C.C. con tiristores o
TRIACs a fin de acompañar este tema de un análisis más profundo en su parte
matemática y en las formas de onda que genera.
Su esquema se representa en la ilustración 1 donde el circuito de potencia
está constituido por la fuente V, el tiristor T1 y la carga Rload y Lload. El resto
del circuito, es decir T1 ', C1 y R1 constituyen los elementos encargados de
bloquear al tiristor principal T1. Además se ha colocado el diodo volante o de
libre circulación 01 necesario cuando la carga tiene componente inductiva, y
así evitar las sobretensiones en el momento del corte del tiristor principal.
106
11
V
Rlood
t..load
FIGURA N°9:1 Interrupción de conmutación forzada por
condensador en paralelo
Analicemos el funcionamiento
suponiendo carga resistiva, para lo cual
eliminamos el diodo volante 01. En el instante t = t0 :
principal
se dispara el tiristor
r; , estableciéndose después del tiempo de cebado una corriente,
la malla V- T;
-
R,oad ,
igual a
~,
en
la tensión en la carga será V y el
Rload
condensador
Para cortar a
~
se carga hasta V a través de R¡ con una constante C- R¡
T; se cebará r;' en el instante t1 • Al pasar a conducción T;', el
punto A que estaba a cero voltios, pasa a +V y por tanto el cátodo de
r;
pasa
a +2V, debido al condensador, recibiendo una polaridad negativa que lo obliga
a cortarse.
En el instante en que
r;'
pasa a conducción, el condensador
~
recibe la
corriente de la carga y al cabo de un instante determinado por su constante de
tiempo
C,oad,
se encontrará cargado con polaridad-+ a la tensión V, con lo que
la tensión en la carga pasa a ser nula. Veamos las formas de onda de este
proceso:
107
10ft
G
.- - - -
2v- -------7------------ -----~--------:
•
•
•
•
•
. ~ VakT1
o.od....._.
1
1
1
.
1
1
1
1
1
1
1
~.~~~====~--~~---------·~---------~
:
'
•
1
1
1
)t=O
-1DD
•
1
- - - - - . - - - - -VGT1
....
·
1
----~
1
VGT1' 1
t1
~---o
o~
t---------~----------~-----~-----------------~--------!
28.8"18111$
22. 000111!0
2Jt. OOOI!Is
26. OOOtrls
r --.--- .. ---------.--·- . . ·-- -- . . ---':"---·- . . ----·- -·--"":-·------- ----,·.·
1aa
¡
VC1
---
· • ....--
Vek1:1
~
IC1 ~
-1aa
¡ : .
'
.•
¡~
vc;n
.
ll .
..
1
:L.:..---.J
VGT1 •
1
t~~~---M----~-~--~-~---~--~--·-~--·~~---·~~--~--~·---~-~-~-~~
25~
FIGURA N°9.2: Formas de ondas de los SCRS
Para una posterior conexión de la carga, el circuito no se encuentra en las
mismas condiciones que para t=O, pues el condensador C1 se encuentra
cargado y T1 'en conducción. Veamos como a partir de t1 + tcebado el circuito
permite ser disparado de nuevo en cualquier momento. Cuando se ceba de
nuevo a T1, estando T1 'en conducción, el apagado de T1 'se produce de forma
idéntica a como se ha explicado para T1. El tiempo te durante el cual la tensión
ánodo-cátodo de T1 es negativa debe superar el tiempo de apagado toff del
tiristor para que este se bloquee, el cual se puede estimar de la siguiente
manera:
1
~kl
=~-
~
-1
=V- (Ve +V)= V- [-V (1- e r) + V.e r +V]
Simplificando:
-1
~k 1
=2V.(l-er)-V para t>t1
108
Para que !Jesulte mayor que
tof! ,
el condensador deberá cumplir con la
siguiente condición:
e
\
> tO;; .1max
1
,off V
=1.45J
,ff
0.69.V
A continuación se muestra algunos circuitos referenciales de cómo se deben
conectar y aplicar estos dispositivos electrónicos para que funcionen como
interruptores .
./ Con transistor bipolar NPN:
Es
un interruptor, como ya se mencionó, con un transistor bipolar NPN,
conectando a una carga con componente inductiva. Para este tipo de carga, es
necesario conecta un diodo en antiparalelo, para suministrar un camino a la
energía almacenada en la inductancia L para proteger al transistor de voltajes
transitorios, durante la desactivación.
~
;"""
+
V~
1
D
i-jlzt,
f
: ~.
1
ll~
'
1
'
•
FIGURA N°9.3 Interruptor con un transistor NPN
./ Con un SCR:
Es un interruptor de corriente continua, basado en un tiristor tipo SCR
de
conmutación rápida. En este caso cuando el SCR se activa con polarización
directa, no tenemos control para su desactivación, dado que la tensión de
alimentación no cambia de polaridad, como el caso cuando se lo utiliza en ca,
que se desactiva en el
comienzo del semiciclo negativo (apagado por
conmutación naturai).Para tener control
en la desactivación, necesitamos
incorporarle un circuito de apagado, también llamado "circuito de conmutación
forzosa". Tenemos una diversidad de circuitos de apagado o descebado como
quiera llamársele, ya depende de cual uno quiera aplicarle.
109
·--------.1
¡; .. ·. ,.
>
Vcc:
1
11
u~,
+ ·---'V'~
_./.
·~"
T
·-
L/.
Ci~uito.&
lifllt!do>
12.
J
•
FIGURA No 9.4 Interruptor con un SCRC
,¡ SCR con conmutación forzada
Se muestra aquí a modo de ejemplo, uno de los varios circuitos de
conmutación forzosa para el apagado del SCR. En este circuito, el SCR se
activa cuando
cerramos el interruptor "11" (este, puede ser un transistor).
Durante la activación, el capacitar C, se carga prácticamente al valor de la
tensión de alimentación "Vcc", a través de la resistencia R2 y el propio tiristor
T1. Cuando queremos desactivar a T1, entonces cerramos el interruptor 12 y
activamos el SCR T2, aplicándole a T1 el voltaje negativo del capacitar.
Con una tensión negativa en los extremos de T1, hace que su corriente
disminuya por debajo de la mínima de mantenimiento, haciendo que T1 se
desactive. Por otra parte T2 que se había activado durante el cierre de 12, no
puede mantenerse en estado activo dado que la resistencia R2, se elige para
que la corriente en este tiristor, no llegue al valor mínimo de retención.
·-----------.-------~
+
Vce
IJ
---~~·~----+
~___;,.n e
:.o-V.
~g~--+-------~1
LTI
FIGURA No 9.5 Interruptor con un SCR y un ejemplo de descebado
110
./ Con un tiristor GTO
El circuito siguiente circuito nos muestra un interruptor de continua, realizado
con un tiristor GTO. Como vemos es este caso no necesitamos un circuito
auxiliar de conmutación, dado que el GTO se activa con un pulso positivo
aplicado entre la compuerta y cátodo, y se desactiva con un pulso negativo
aplicado en los mismos terminales.
+
FIGURA N°9.6 Interruptor con un GTO
./ Con un transistor MOSFET (CANAL- N)
El circuito representa un interruptor realizado con transistor MOSFET, canal N,
con sus funciones internas de control y protección. Estos interruptores, se
suministran
comercialmente como un solo modulo con tres terminales:
D(drenaje), para conectar la
carga, S(surtidor o fuente), para conectar al
negativo de la alimentación y E (entrada), donde se aplica el voltaje para la
activación y desactivación.
----------1
Carg:a Z
D
VDD
FIGURA No 9.7 Interruptor con un transistor MOSFET (CANAL- N)
~
111
Interruptores Estáticos de Corriente alterna monófásico
~l ~r'
i 1 L
u
~
u
a
--+
1
'
.
1!1.
·~~"\
--+
;2
•l~
il
+
io
ri
lo+
.._
io
\'0
.
~
~
~
\'S,
.
1)1
Ol
ll
+
vs
11..1
r•
rt)11
•
.
n
+
vo
Fl
1:~
-
FIGURA No 9.8 Interruptor de CA con tiristores (Derecha: Con cátodo
común)
La figura anterior muestra dos circuitos que realizan la misma función, con la
diferencia que segundo circuito los tiristores tienen cátodo común, y las señales
de disparo tienen terminal común. En ambos casos, el tiristor T1 se dispara en
el inicio del semiciclo positivo de la tensión de entrada, para carga resistiva, o
la corriente de entrada, para carga inductiva. Para el semiciclo negativo de la
tensión o corriente, se activa el tiristor T2. Las siguientes gráficas, muestran los
momentos de disparo de los tiristores para ambos tipos de carga:
Vm
o
\'m
(l
'"
\'ntiJZI~
o
.
g)i
o
~t
1
'
.
glt
\\1
'
\\1
•
.
.
:
'
.
.
.
:t .
()
.
1
'.\11'
.
: W1
'
FIGURA No 9.9 Formas de Ondas de disparo
112
Si las condiciones de tensión y corriente lo permiten, los dos tiristores pueden
ser reemplazados por un triac como lo muestra el próximo circuito. En este
caso el TRIAC se dispara también en los cruces por cero, con un pulso positivo
en la compuerta, respecto al terminal T1, en el inicio del semiciclo positivo
(Vgt1) y un pulso negativo para el inicio del semiciclo negativo. (Para cargas
inductivas, trenes de pulso).
TRIAC
ls +-
T1
+
RL
vs
vo
10 Ohm
FIGURA No 9.1 O Interruptor de CA con tiristor
Un puente rectificador de diodos, con un tiristor o un transistor, como se
muestra en la siguiente figura, pueden realizar la misma función que los casos
anteriores. A este conjunto de dispositivos semiconductores, se le denomina
"interruptor bidireccional".
Ol
01
......
lloJ
rr
___..~ ~'N
01
+·
VS
-
~
...
+
02
.....
....
VO
•.
RL
lO Cl\1'11
FIGURA No 9.11: Interruptor de CA con tiristor y 4 diodos
Durante el semiciclo positivo de la tensión de entrada, la corriente circula hacia
la carga, a través de D1, T1, y D2. Durante el semiciclo negativo, la corriente se
invierte en la carga, circulando por 03, T1 y 04. Como vemos la corriente del
tiristor (o transistor) es unidireccional.
113
Interruptores Estáticos de Corriente alterna trifásico
El concepto de conmutación de CA monofásica se puede ampliar a las
aplicaciones trifásicas. Se pueden conectar tres interruptores monofásicos
como el de la figura 1 para formar un interruptor trifásico, como se ve en la
figura 2. Las señales de disparo para los tiristores y la corriente por T1 se
muestran en la figura 3. La carga se puede conectar en Y o en delta.
Para reducir la cantidad y los costos de los tiristores, también se puede usar un
diodo y un tiristor para formar un interruptor trifásico, como se ve en la figura 4.
En el caso que se conecten dos tiristores 'espalda con espalda' existe la
posibilidad de detener el flujo de corriente de cada medio ciclo (por ejemplo
8.33ms para un suministro de 60Hz). Sin embargo, con un diodo y un tiristor, el
paso de la corriente solo se puede detener cada ciclo de voltaje de entrada, y
se vuelve lento el tiempo de reacción (por ejemplo 16.67ms para una fuente de
60Hz).
i,
+
•
\'
....
in
J
.....
i
T¡
+
lA
cfT;
in
ti0
~
Vo
~RL
-
FIGURA No 9.12: Interruptor de ca monofasico con tiristor
A
1-------a
8
e
e
FIGURA No 9.13 Circuito Interruptor de CA trifásico con tiristor
__f}-
114
.
.
.
o
1\o
...
o
e.
o
o
...
..
..,
'•
"
...
FIGURA No 9.14 Formas de onda Interruptor de CA trifásico con tiristor
FIGURA No 9.15 Interruptor de CA trifásica con diodo y tiristor
Interruptores trifásicos reversibles
Se puede tener la inversión de la potencia trifásica suministrada a una carga
agregando dos interruptores monofásicos más al interruptor trifásico de la
figura 2. Esto se ve en la figura 5. En la operación normal, los tiristores T7 a
T10 se desactivan con inhibición (o supresión) de pulsos de compuerta y se
activan los tiristores T1 a T6. La línea A alimenta a la terminal a, la línea 8 a la
terminal b y la línea C a la terminal c. En la operación de inversión de fase, los
tiristores T2, T3, T5 y T6 se desactivan por inhibición de pulso de compuerta y
los tiristores T7 a T1 O son operativos. La línea 8 alimenta a la terminal e y la
línea C alimenta a la terminal B, siendo esto una inversión de fase de voltaje
aplicado a la carga. Para obtener la inversión de fase, todos los dispositivos
115
deben ser tiristores. No se pLH3de usar una combinación de tiristores y diodos,
como de la figura 4 porque sucedería un corto circuito de fase a fase.
FIGURA No 9.16 Interruptor reversible de CA trifásica con tiristor
Interruptores de CA para transferencia de canal
Se pueden usar los interruptores estáticos para transferir canales de
distribución de una fuente a otra. En un sistema práctico de suministro, a veces
se requiere cambiar la carga de la fuente normal a una fuente alternativa, en
caso de:
1. No disponibilidad de la fuente normal.
2. Condiciones de bajo voltaje o alto voltaje en la fuente normal. La
figura 6 muestra un interruptor monofásico de transferencia de
canal. Cuando funcionan los tiristores T1 y T2, la carga se
conecta con la fuente normal, y para transferir a una fuente
alternativa, los tiristores T'1 y T'2 son operativos, mientras que T1
y T2 se desactivan por inhibición de señal a compuerta. En la
figura 7 se muestra la ampliación de la transferencia de canal
monofásica a transferencia de canal trifásica.
~T;
Tt,¿'_
...
:,
1
1
1
1
+
1
./'1
+
;;
Tz
>'¡
....
V~
Rl
'':
FIGURA No 9.17 Interruptor monofásico para transferencia de canal
116
FIGURA No 9.18 Interruptor trifásico para transferencia de canal
./ Aplicación de los Interruptores Estáticos
Compensadores Estáticos de Potencia Reactiva
Como aplicación de los interruptores estáticos podemos mencionar a los
compensadores estáticos de potencia reactiva (SVC) en el campo de la
Ingeniería Eléctrica.
Uno de los problemas habituales en ingeniería eléctrica resulta de la necesidad
en introducir, bajo determinadas circunstancias, en la red elementos que
controlen la potencia reactiva.
Un elemento que se ha venido aplicando para obtener una regulación continua
de reactiva, tanto generada como consumida, es el condensador síncrono. Se
trata de un motor síncrono funcionando en vacío, de forma que, si se actúa
sobre su excitación, éste se comporta como una carga inductiva si está
subexcitada, o como una carga capacitiva si está sobreexcitado. Las
características del condensador síncrono son:
./ La regulación de la potencia reactiva es muy fácil y progresiva, pudiendo
compensar tanto cargas inductivas como capacitivas, tanto en régimen
estático como transitorio .
./ A pesar de su marcha en vacío, el compensador síncrono absorbe una
potencia activa apreciable debido a las pérdidas mecánicas .
./ Su instalación implica considerables gastos de montaje y mantenimiento.
Lo anteriormente expuesto sirve para poner de manifiesto que en las
aplicaciones en las que hay una necesidad un consumo o generación variable
de potencia, se utilizan equipos basados en elementos electromecánicos, lo
que limita en gran medida su utilización. Esta situación cambia en el momento
en el que se introduce la electrónica de potencia en el diseño de estos equipos,
~
117
apareciendo así el concepto del Compensador Estático de Potencia Reactiva o
Static Var Compensator (SVC) cuyo funcionamiento se basa en la utilización de
tiristores conjuntamente con condensadores y bobinas.
Elementos y principio de funcionamiento
Los elementos más característicos de un SVC son los condensadores
conmutados por tiristores (TSC) y las bobinas conmutadas (TSR) o controladas
(TCR) por tiristores, ya que estos dispositivos son los que incluyen la
electrónica de potencia. En la figura 14 se muestra un esquema simplificado
para un SVC donde se incluyen los elementos anteriormente mencionados.
TCR
TSR
TSC
e
FIGURA No 9.19 Esquema simplificado para un SVC
);>
Condensador conmutado por tiristores
El esquema del condensador conmutado por tiristor o thyristor switched
capacitar (TSC) representa la configuración más sencilla de la utilización de
dispositivos electrónicos de potencia en el control de reactiva. Este elemento
está formado por un interruptor de estado sólido en serie con un condensador o
batería de condensadores.
Interruptor de estado sólido
TRl
L
o
i(t:)
..
TR2
e(t)
FIGURA No 9.20 Configuración de un TSC
118
En la figura 15 se muestra un interruptor de estado sólido formado por dos
tiristores (TR1 y TR2) en antiparalelo. be forma que, para conectar el
condensador (C) se disparan los dos tiristores al mismo tiempo empezando a
conducir tan pronto estén polarizados positivamente. Para la desconexión se
anula la señal de disparo y los tiristores se apagarán en el instante en que la
corriente que los atraviesa cruce por cero.
);>
Bobina conmutado por tiristores
Otro elemento característico en los SVC es la bobina controlada por tiristores o
thyristor contro/led reactor (TCR). La principal misión de este elemento es la de
conseguir una regulación continua y rápida de la potencia reactiva consumida
por una bobina.
El esquema de un TCR (ver figura 16) está formado por una bobina (R+L) y un
convertidor CA/CA compuesto por dos tiristores en antiparalelo. En este caso, a
la electrónica de potencia se le aplica un control de fase, de forma que se
regula el valor eficaz de la corriente que circula a través de la reactancia.
Convertidor CAlCA
TRI
i(t)
L
TR2
e(t)
FIGURA No 9.21 Configuración de un TCR
Si en vez de realizar un control de fase, los tiristores se emplean como si
fuesen un interruptor estático, la configuración descrita recibe el nombre de
bobina conmutada por tiristores o thyristor swicthed reactor (TSR). Para
minimizar los transitorios de desconexión el instante más favorable sería
cuando la tensión de alimentación alcanzase su nivel máximo o mínimo
l.
CIRCUITO DE EJEMPLO
Mostraremos un circuito simple de ejemplo, para el cual usaremos los
TIRISTORES, específicamente a los SCRs ya que queremos trabajar con OC,
119
y además por su menor costo, así como la mayor familiaridad que tiene para
con nosotros.
Usaremos el BT151, el cual será encendido mediante una señal en su gate.
Para apagarlo usaremos un transistor bc548, el cual será activado por una
señal en su base, lo que hará básicamente es poner en corto circuito el ánodo
y el cátodo del SCR, robándole la corriente de mantenimiento, y por ende,
apagándolo.
El circuito es el siguiente:
FIGURA No 9.22 Esquema de Interruptor Estático con SCR
Funcionamiento:
Primero mandamos un pulso al Gate del SCR, quedando este encendido:
01
01
R3
"
FIGURA No 9.23 Disparo con un pulso a Gate.
Este pulso puede ser enviado desde la misma fuente que está alimentando al
LEO, así como también de una manera mas automática (que es lo que se
busca) puede ser enviado desde un microcontrolador (como se mostrara en un
ejemplo posterior), el punto es que simplemente necesitamos mandar un pulso,
solo uno, para que el SCR se quede enganchada para siempre, hasta que se
120
desconecte la fuente, o hasta que se mande un pulso al transistor, que es lo
que haremos a continuación.
R2
01
470
01
1
Pu!oó - - - { R = 1:::::1----"
R3
1---c::::J---
Pul<o
"
FIGURA No 9.24 Disparo con un pulso al transistor
Ahora mandamos un pulso a la base del transistor, como ya se explicó, esto
provocara que el transistor conduzca, y que entonces pongamos en corto
nuestro SCRs, haciendo que el transistor se robe toda la corriente, dejándola
por debajo de la corriente de mantenimiento y este termine por apagarse.
Y entonces con esto tenemos un interruptor estático con un SCR y un
transistor.
CONTROL DE UN MOTOR PAP BIPOLAR MEDIANTE SCRs Y UN
MICROCONTROLADOR ATMEGA 8
Ejemplo un poco más complicado y trabajado pero que se basa directamente
en la idea anteriormente planteada (SCRs como interruptores estáticos). Aquí
se nota que las 4 primeras salidas del microcontrolador atmega8 van para
encender los 4 SCRs y las otras 4 van para apagar los mismos, luego
conectándose con cada uno de los 4 cables de nuestro motor PAP BIPOLAR y
así pueda ser controlado según nosotros queramos con solo enviar pulsos.
121
FIGURA No 9.25 Control de un motor PAP bipolar mediante SCRs
PLACA DE NUESTRO CIRCUITO DE EJEMPLO
A continuación se muestra el circuito hecho en Eagle y listo para ser ya
soldado, se pega el archivo en pdf, el que va a ser impreso.
FIGURA No 9.26 Circuito realizado con Software Eagle
A modo de ejemplo, mostramos en la siguiente figura, el esquema de bloques
funcional, de un interruptor inteligente de potencia, comercializado por una
empresa importante, sin realizar comentarios.
122
r-------------------------------------------1
1
1
+\fJllli) 1 3
1
1
1
1
1
1
1
1
1
1
1
1
.
11
1
Fuente
de
voltaje
1
1
1
1
í
1
21 ENT
1
1
1
1
1
1
Protección de
compuerta
Limitador
de
corriente
1
1
l_.vk'tJoo
J
1
1
1
1
1
1
Protección
de
sobrevoltaj e
31ST
1
1
~
11
1
11
S
1
SalfdaJ: S
Limite para
cargas induc. no
sujetas a un
nivel
Se!L~or de
temperatura
'
l
Circuito
de
entrada
acti\•ador
11
1
j_
j Bomba de ct\fga
• de,c;plazador de
nh•el de para
rectificador
1
l
1
,1
Circuito
de
Detección
circuito
abierto
1
1
1
11
1
lógica
L
¡
1
1
L.-----~
1
---------------------------------~
1
Detección
cortocircuito
~
:deb
:t:arg,3
------'
FIGURA No 9.27 Interruptor inteligente de potencia
123
CAPITULO X
FUENTES DE PODER OC, AC.
10.1 Fuente de poder con SCR AC, OC
El circuito sirve para alimentar diversas aplicaciones en las cuales el consumo
no sea mayor a 4 A. El puente de diodos junto con el condensador C1 se
encarga de rectificar la tensión de entrada. El diodo 01 se encarga de
proporcionarle la tensión de referencia al transistor de regulación T1. Variando
la tensión de base se produce variación de la tensión de salida. Si la corriente
de salida o la tensión de entrada varían, este variará su polarización, de forma
que T2 y T3 conduzcan más o menos estabilizando así la tensión de salida.
El sistema de protecciones formado por T4 y 06, protege a la carga contra
tensiones superiores a 12 voltios, cortocircuitando la salida de la fuente.
T3
T2
~
':=? ,f4
1
r
R1
¡::· C1::: ::::• C"1
R2
ta
11
+
RO
+CO,
:::::::· C5
R3
06
~~ R5
-,
fl6
==¡
'¡
.
hP1
.::¡<' 01
~
-=~
'
-
-'
-··
--
-
~
~
. .J.-
'
·-
FIGURA No 10.1 Fuente de poder con BJT
10.2 Fuente de Poder de Tensión variable de 5-15 V. protegida con SCR.
Esta es una fuente ajustable de tensión con limitación de corriente mediante
un SCR. Cuando la carga conectada consume más de 2 amperios se dispara el
SCR y disminuye la tensión de salida al mínimo protegiendo de esta manera a
la fuente. Podemos volver a poner la fuente en su condición inicial accionando
sobre el pulsador SW1.
124
...
2N311l55
DliT'-1
DI
1Ml1
FIGURA No 10.2 Fuente de poder con SCR
R1 debe ser de 2 Watt colocada en posición vertical.
C7 = 1nF
U1 SCR
=C106
Q1 (2N3055) tiene que ir montado en un disipador. La tensión de entrada de
alterna debe ser, más de 15 voltios y el transformador de unos 40 watts de
potencia.
FIGURA No 10.3: Circuito impreso de la fuente con BJT
125
10.3 Fuente con SCR
Circuito diseñado:
t3
+
FIGURA No 50.4: Fuente con SCR de protección
El circuito sirve para alimentar diversas aplicaciones en las cuales el consumo
no sea mayor a 4 A. El puente de diodos junto con el condensador C1 se
encarga
de rectificar la tensión de entrada. El diodo 01 se encarga de
proporcionarle la tensión
de
referencia
al transistor de regulación T1.
Variando la tensión de base se produce variación de la tensión de salida. Si la
corriente de salida o la tensión de entrada varían, este variará
polarización, de forma que T2
su
T3 conduzcan más o menos estabilizando
asila tensión de salida.
El sistema de protecciones formado por T4 y 06, protege a la carga contra
tensiones superiores a 12 voltios, cortocircuitando la salida de la fuente.
TABLA No 2
COMPONENTESDELAFUENTEDEPODERDC-AC
R1 1 kO
R2 100
n
C1 4700
C2 10
~F
~F
Puente rectificador 6A 1OOOV
01 1N4735A Zener 6,2V 1W
R3 470 O
C3 10 nF
06 1N4742A Zener 12V 1W
R41 kO
C4 10 nF
T1 BC549
R5 220
n
C5 470
~F
T2 TIP29
R61 kO
C6 47 nF
T3 2N3055
R7 4.7 kO
transf 20v
T4 2N5060
126
FIGURA No 10.5 Fuente regulada con BJT y protección con SCR
10.4 Fuente de alimentación de 2 salidas
Introducción
Todos los circuitos electrónicos deben ser alimentados, es decir requieren
cierto voltaje y corriente para funcionar. Así pues, surge la necesidad de una
fuente de poder (F.P.).
Cada dispositivo electrónico requiere un tipo específico de alimentación, por
ejemplo existen fuentes de poder de duración finita, como las pilas, que
además
de
tener
un
tiempo
de
aprovechamiento
limitado,
también
proporcionan una cantidad restringida de corriente.
Sin embargo, la mayoría de los dispositivos utilizan fuentes de alimentación
"enchufables", que se conecten a la línea y puedan trabajar el tiempo que se
necesite sin problemas. Este tipo de F.P. se puede diseñar para que
proporcione la corriente y el voltaje específicos requeridos por el aparato.
Los circuitos electrónicos digitales requieren una alimentación constante y fija·
para su correcto funcionamiento, es por esto ·que la F .P. debe ser "regulada",
en otras palabras, eliminar lo más posible las variaciones de voltaje
independientemente de la carga (Load) que se le conécte y poder entregar una
corriente de 1 a 2 Amperes.
127
Desarrollo Teórico
Funcionamiento general de la fuente de poder
Nuestra Fuente de Poder es "enchufable", es decir se conecta en un enchufe
de la línea, y está planeada para alimentar circuitos digitales.
En los enchufes de la Hnea tenemos corriente alterna (C.A.),
que es una
energía de tipo senoidal que tiene asociada una amplitud y una frecuencia.
A= Amplitud
T =periodo
f = frecuencia = 1/T
t = tiempo (variable independiente)
w = 21t f
Vc.A.= Voltaje de Corriente Alterna= A sen(wt)
(variable dependiente)
VeA
t
T
FIGURA N°10.6 Propiedades de la corriente
En particular, la energía que tenemos en los enchufes de la línea tiene una
amplitud A=125V. (aprox) y una frecuencia f = 60Hz. (aprox)
Así que T = 1/f = 0.016667 (aprox)
Como se muestra en la figura 10.7.
VeA
t
-62.5 ----
·---
0.016667
FIGURA No 1O. 7 Valores de la corriente de línea
128
Los circuitos digitales que vamos a alimentar requieren un suministro de
corriente directa (C.D.).
La corriente directa es una energía con amplitud constante (teóricamente), es
decir, el voltaje no debe estar cambiando respecto al tiempo.
En particular, el voltaje que nuestra fuente entrega será de 5V. Como se ve en
la Fig 10.8.
Pero además deberá poder entregar una corriente de 1 a 2 amperes.
V.C.D.
+5
---f-----------~
t
FIGURA No 10.8 Corriente directa de 5 V
El voltaje regulado
Ya habíamos dicho que nuestra F.P. servirá para alimentar circuitos digitales
con un voltaje regulado de 5V. de corriente directa.
Que el voltaje sea "regulado" significa que deberá mantenerse lo más estable
(fijo) posible aunque se le conecten distintos tipos de carga (Load) y aunque
existan variaciones en la energía de la línea o efectos de ruido por factores
físicos.
Una carga
L (Load en inglés), es cualquier dispositivo electrónico que va a
demandar corriente a una fuente de poder. En otras palabras, es el circuito que
será alimentado por la F.P. y que consume corriente y voltaje.
En términos generales ...
En términos generales nuestra F.P. es un convertidor de C.A. a C.D. con las
características antes mencionadas.
129
Esto se describe en la figura 10.9.
FIGURA No 10.9 Señal de salida regulada
Funcionamiento por partes
Podemos dividir el funcionamiento de nuestra F.P. en cuatro etapas
fundamentales:
Etapa 1.- Reducción de la amplitud de C.A.
Como sabemos, nuestra fuente se conecta al enchufe de la línea. De esta
manera, tenemos en la entrada una energía de C.A. con amplitud A=125
(aproximadamente). Esta es una amplitud muy grande, así que debemos
disminuirla antes que cualquier otra cosa.
Para ello usamos un transformador que se conecte al enchufe y nos
proporcione como salida una energía de C.A. pero con amplitud reducida a
9Volts. (Figura1 0.1 O)
'M
CA
Coniente reducida
9 l()tts C.A 60Hz.
''·· z--····-·······= ·········:r-······ .........
.g····
-·····--
J.
FIGURA No 10.1 O Reducción de la tensión de entrada
Etapa 2.- Rectificación de la señal
Ahora ya tenemos una señal con amplitud más pequeña, sin embargo sigue
siendo C.A., así que tiene partes positivas y partes negativas.
La corriente directa que nosotros necesitamos no debe tener partes negativas,
así que usaremos un dispositivo llamado "puente rectificador" para producir una
señal que tenga las partes negativas reflejadas hacia arriba, es decir,
cambiadas de signo. Fig. 1O.1 O
130
~V
Corriente reducida
9 \t>tts CA 60Hz.
• 9 .. r-"'-........... ,......_........... ,....... ... . .......
.g·
J.
···-······'
y~1
.
Riente
rectifiCador
S.ñal rectifiCada
Corriente directa
r---\
l_____(
FIGURA No 10.11 Etapa de rectificación
Etapa 3.- Filtrado de la señal
La corriente directa pulsante está formada por picos consecutivos, es decir, el
voltaje va cambiando de cero hasta cierto límite y luego vuelve a bajar y se
repite periódicamente. Esto no nos sirve porque nosotros necesitamos un
voltaje constante (idealmente), así que someteremos la señal pulsante a un
proceso de filtrado, en el cual se hace continua la señal por medio de
integración de las partes.
El filtrado se logra con un dispositivo llamado filtro o integrador y arroja una
señal más uniforme y continua.
~V
S.ñal rectificada
Corriente directa pulsante
~J.
V
y
Rltro
o
Integrador
q
S.ñal filbada
Corriente directa
~
~
FIGURA N°1 0.12 Etapa de filtrado
Etapa 4.- Regulación de la señal
En este momento nuestra señal se comienza a parecer a una línea recta, sin
embargo, todavía tiene muchas variaciones que impiden su utilización.
De alguna manera nosotros necesitamos estabilizar esta señal, es decir,
eliminar las ondulaciones y las ligeras altas y bajas de voltaje producidas por el
ruido y factores físicos. Para esto usamos un dispositivo "regulador'' que
suprime las ondulaciones y fija la señal en un voltaje específico, además
agregaremos un par de capacitares que absorben el ruido para dejar la salida
limpia y estable. Figura 10.13
131
¿V
S.ñal filtlada
Conlenle direcla alisada
)J
y
~
.1
R:lgulador
y capacttores
y
S.ñal regulada
Conlenle direcla
.1
FIGURA No 60.13 Etapa de regulación
De esta manera, el funcionamiento de nuestra F.P. puede verse dividido en las
4 etapas como muestra el siguiente diagrama a bloques: (Figura 10.14)
~
Fegulador
Q
Riente
Fectificador
Q
Rltro
o
Integrador
Q
Fegulador
y
Capacttores
FIGURA N°10.14 Diagrama de bloques
El voltaje de rizó (ripple)
Vimos que al salir de la etapa 3 se tiene una corriente directa alisada, y al salir
de la etapa 4 ya tenemos una corriente directa regulada y sin ruido. En ambos
casos se puede observar un fenómeno conocido como el "voltaje de rizo" o
"ripple".
El "ripple" es la variación que ocurre en la señal (voltaje) respecto a la línea
recta teórica
que se tendría en condiciones ideales. Esta variación aparece
debido a todas las imperfecciones de los materiales, a las limitaciones físicas,
de equipo, instalación, cableado, componentes electrónicos, así como al ruido y
diversos factores del entorno. (Véase figura 1O)
~ñal filtrada
Corriente directa alisada
~ñal
r
regulada
Corriente directa
Esto es el ripple
Amplificación
Esto es el ripple
FIGURA N°1 0.15 Voltaje de rizo o ripple
132
El efecto "ripple" aumenta cuando se aumenta la carga "Load" conectada a la
F.P., es decir, al solicitarle más corriente.
Se supone que en condiciones ideales, la etapa 4 debería anular todo este
fenómeno, es decir, en condiciones ideales no debería haber "ripple" a la salida
de la F.P. sin embargo ocurre y mediremos la calidad de nuestra fuente en
términos de qué tan pequeño resulta ser.
Para disminuir lo más posible el voltaje de rizo podemos considerar la siguiente
fórmula:
Vrizo=
(IL * 0.007) 1 e
Donde:
C es el valor de la capacitancia del filtro.
IL es la corriente consumida por la carga (Load)
Así pues, para disminuir el voltaje de rizo podemos usar un valor de
e grande.
El circuito electrónico
En base a la teoría que revisamos antes, podemos dibujar el circuito
electrónico para la Fuente de .Poder.: (figura 10.16)
Fi.Ji:ible
A.lente rectificador2 Amperes
o 4 diodos 1N4003
""
Feferencia
Capacitar
electrolítico
470 f.l f
25 \bits
--=::--
tiena
OV
Capacitares cerámicos
para ruido
0.1
f.lf
FIGURA No 10.16 Fuente de Poder
133
Material y equipo
Cantidad
Componente
1
Transformador de 125 V. a 9 V.
2 Amperes
Fusible de 250 Volts, 1 Ampere.
Porta fusible
1
Puente de diodos de 2 Amperes
Capacitar electrolítico de 470 ¡..t f a 25 Volts
Capacitares cerámicos o de mylar de O. 1 f.1 f
Regulador 7805
Cordón con clavija
1
Protoboard
Varios
Trozos de alambre telefónico para realizar las conexiones
Equipo de laboratorio:
1 Osciloscopio
1 Multímetro
1 Fuente de alimentación
Material para montar la fuente:
Tablilla perforada
Cajita
1nterruptor
LED
Terminales con caimanes y bornes para conectar
Cable
Tornillos y tuercas
Pinzas, destornilladores
Soportes para tablilla perforada
Cautín, soldadura, pasta para soldar
Desarrollo experimental
Primero se montaron los dispositivos electrónicos en la protoboard haciendo las
conexiones con alam,bres de acuerdo al circuito que vimos antes.
Fue necesario soldar alambres en las patas de algunos componentes para
facilitar su colocación en la protoboard porque no es recomendable doblar
demasiado las terminales o conectar todo muy cerca.
El circuito montado se veía así (figura 12):
134
FIGURA No 10.17 Circuito montado en protoboard
Luego se realizaron mediciones en cinco sitios del circuito, éstos se marcan en
la figura 13:
8
FIGURA No 10.18 Puntos de medición
Nota importante: Para hacer la medición en un sitio del circuito, sólo se
consideran los componentes que existen desde el inicio hasta ese par de
puntos, es decir, se desconecta el resto del circuito a partir del sitio de interés.
Esto se debe a que si dejamos conectados todos los componentes
subsecuentes durante la medición, su presencia "activa" va a alterar los valores
medidos.
Para el control de los voltajes se utilizó el componente LM317 y mediante la
programación del PIC 16F877A, más adelante se podrá observar el código de
dicho PIC, este PIC recibe la información del circuito y en la pantalla LEO
muestra dicho voltaje.
135
Código del PIC:
A continuación se verá la programación utilizada sobre el PIC para este
proyecto:
#/NCLUDE <C:\Program Files\PICC\Devices\16F887.h>
#DEVICE ADC=BI/SOLO UTILIZADO PARA CONVERSOR AD
1/#FUSES INTRC,MCLR,NOWDT,NOLVP
//DATOS PARA PIC-16F887
/1#/NCLUDE <C:\Program Files\PICC\Devices\ 16F877A.H>
1/#DEV/CE
#FUSES
ADC=B
XT,NOWDT,NOL VP
#USE
DELA Y(CLOCK=4M)
#/NCLUDE <C:\Program Fi/es\PICC\Drivers\lcd. e>
voidmain(void)
{
//variables de contador;
signedi=4,j=4;
int k=O, contador= O;
//variables de programa central
float x;
lcd_init();
setup_adc(ADC_ CLOCK_D/V_32);
setup_adc_ports(SANO);
1/setup_adc_ports(ANO);
set_adc_channe/(0);
de/ay_ us(40);
//instrucción para bienvenida de fuente
output_high(PIN_A3);
lcd_gotoxy(4, 1);
lcd_putc("Bienvenido'?;
/cd_gotoxy(4,2);
lcd_putc("Eiectronic'?;
delay_ms(200);
lcd_putc('~f?;
if(k==O){
do{
136
lcd_gotoxy(i, 1);
lcd_putc("Bienvenido'~;
lcd_gotoxy(j,2);
lcd_putc("Eiectronic'~;
delay_ms(200);
lcd_putc('if'~;
i--;
j--;
contador++;
}while(contador!=15);
k++·
'
}
//Instrucción lectura de tensión
BUCLE: x=read_adc();
lcd_gotoxy(2, 1);
lcd_putc("FUENTE-
UNAC'~;
lcd_gotoxy(1 ,2);
printf(lcd_putc, "VOLTAJE=%f V ':(x*30)/255);
delay_ms(100);
goto BUCLE;
}
Diseño de las placas
A continuación se mostrará la placa, en la cual se han colocado los
componentes, para ello se ha utilizado conocimientos de creación de placas y
la creación del circuito en un implementador de placas, en este caso el
software EAGLE, cabe recalcar que se diseñó una placa, pero como la fuentes
es de doble salida de voltaje, la placa fue duplicada, debido a que de una sola
placa no se nos hizo posible efectuar el voltaje
137
FIGURA No 10.19 Circuito completo de la fuente con micro controlador
FIGURA No 10.20 Circuito impreso y coleccionado
138
··········
····················· ..................... ..
- ································
················································•
p
••
• ••••• •••••••
••••••••••••••••••
•••••••••••
••••••••••
FIGURA No 10.21 Montaje en el circuito impreso de la fuente controlada con
microcontrolador
Teniendo la implementación en Eagle, se procede a ordenar los componentes
, a conveniencia, para poder ubicar mejor los componentes y a su vez poder
calcular el tamaño con el cual se deseá trabajar, el ordenamiento es arbitrario y
a voluntad.
Análisis del desempeño:·
Tal
y como
se
p~ede
ver en la simulación del proteus y la captura de una
imagen de una video, se observa que el proyecto está funcionando tal y cual
estaba establecido.
FIGURA No 10.22: Simulación en Proteus de la fuente controlada
con microcontrolador
139
CAPITULO XI
PROPULSORES DE AC.
Un propulsor de corriente alterna
está relacionado a controlar y mejorar el
rendimiento de (motores AC), motores de inducción.
El propulsor de corriente alterna tiene principio de funcionamiento también
puede controlar la tensión de estator y la tensión del rotor.
Ala vez puede controlar la frecuencia de funcionamiento del estator y también
puede controlar la corriente de un estator.
Ahora vamos a ver un poco sobre motores ac:
El (motor síncrono) es en esencia un alternador trifásico que funciona a la
inversa. Los imanes del campo se montan sobre un rotor y se excitan mediante
corriente continua, y las bobinas de la armadura están divididas en tres partes y
alimentadas con corriente alterna trifásica. La variación de las tres ondas de
corriente en la armadura provoca una reacción magnética variable con los
polos de los imanes del campo, y hace que el campo gire a una velocidad
constante, que se determina por la frecuencia de la corriente en la línea de
potencia de corriente alterna.
La velocidad constante de un motor síncrono es ventajosa en ciertos aparatos.
Sin embargo, no pueden utilizarse este tipo de motores en aplicaciones en las
que la carga mecánica sobre el motor llega a ser muy grande, ya que si el
motor reduce su velocidad cuando está bajo carga puede quedar fuera de fase
con la frecuencia de la corriente y llegar a pararse. Los motores síncronos
pueden funcionar con una fuente de potencia monofásica mediante la inclusión
de los elementos de circuito adecuados para conseguir un campo magnético
rotatorio.
El más simple de todos los tipos de motores eléctricos es el (motor de
inducción de caja de ardilla) que se usa con alimentación trifásica. La armadura
de este tipo de motor consiste en tres bobinas fijas y es similar a la del motor
síncrono. El elemento rotatorio consiste en un núcleo, en el que se incluyen
una serie de conductores de gran capacidad colocados en círculo alrededor del
árbol y paralelos a él. Cuando no tienen núcleo, los conductores del rotor se
parecen en su forma a las jaulas cilíndricas que se usaban para las ardillas.
~140
Los motores de baterías en serie con conmutadores, que funcionan tanto con
corriente continua como con corriente alterna, se denominan motores
universales. Éstos se fabrican en tamaños pequeños y se utilizan en aparatos
domésticos.
~·141
CAPITULO XII
PROTECCION DE DISPOSITIVOS Y CIRCUITOS
12.1
Introducción
Debido al proceso de recuperación en sentido inverso de los dispositivos de
potencia y las acciones de conmutación en presencia de inductancias de
circuito, pueden presentarse voltajes transitorios en los circuitos convertidores.
Aun en los circuitos diseñados con cuidado, pueden existir condiciones de falla
por cortocircuito, dando como resultado un flujo excesivo de corriente por los
dispositivos. El calor producido por las pérdidas en un semiconductor se debe
disipar de modo suficiente y eficaz para que las condiciones del circuito no se
salgan de las especificaciones técnicas de los dispositivos de potencia,
proporcionando
protección
contra
sobrevoltaje,
sobrecorriente
y
sobrecalentamiento. En la práctica los dispositivos de potencia mayormente se
protegen contra lo siguiente:
~
Avalancha térmico, con disipadores de calor
~
Altas tasas de dildt y dv/dt, con amortiguadores
~
Estados transitorios por recuperación inversa
~
Estados transitorios en el lado de la alimentación y de la carga
~
Condiciones de falla, con fusibles
Y para ello se úsalos componentes que describiremos a continuación:
12.2 El fusible
El fusible es dispositivo utilizado para proteger dispositivos eléctricos y
electrónicos. Este dispositivo permite el paso de la corriente mientras ésta no
supere un valor establecido.
Si el valor de la corriente que pasa, es superior a éste, el fusible se derrite, se
abre el circuito y no pasa corriente. Si esto no sucediera, el equipo que se
~2
alimenta se puede recalentar por consumo excesivo de corriente: (un corto
circuito) y causar hasta un incendio.
El fusible normalmente se coloca entre la fuente de alimentación y el circuito a
alimentar. En equipos eléctricos o electrónicos comerciales, el fusible está
colocado dentro de éste. El fusible está constituido por una lámina o hilo
metálico que se funde con el calor producido por el paso de la corriente.
Lámpara
1nterruptor
····~· ~
Conductor:
....
··~.
~~
Generador:
FIGURA No 12.1
FIGURA No 12.2
Fusible encapsulado de vidrio
Circuito básico con protección fusible
Es una práctica común reemplazar los fusibles, sin saber el motivo por el cual
este se "quemó", y muchas veces el reemplazo es por un fusible de valor
inadecuado. Los fusibles deben de tener la capacidad de conducir una
corriente ligeramente superior a la que supuestamente se dé "quemar". Esto
con el propósito de permitir picos de corriente que son normales en algunos
equipos.
Los picos de corriente son valores de corriente ligeramente por encima del
valor aceptable y que dura muy poco tiempo. Hay equipos eléctricos que piden
una gran cantidad de corriente cuando se encienden (se ponen en ON). Si se
pusiera un fusible que permita el paso de esta corriente, permitiría también el
paso de corrientes causadas por fallas "normales" que harían subir la corriente
por encima de lo normal. En otras palabras: el circuito no queda protegido.
Fusible
....
Fuente
de poder
1
1
amperio
Equipo que
necesita
0.85 Amp.
FIGURA No 12.3 Circuitos de protección con fusible
~3
Para resolver este problema hay fusibles especiales que permiten, por un corto
período de tiempo (ejemplo: 10 milisegundos), dejar pasar una corriente hasta
1O veces mayor que la corriente normal. Si después de pasado este tiempo la
corriente sigue siendo grande, el fusible se "quema".
Cuando se queme un fusible, siempre hay que reemplazarlo por uno de las
mismas características, sin excepciones, previa revisión del equipo en cuestión,
para determinar la causa de que el fusible se haya quemado.
¿Cómo saber qué valor de fusible utilizar?
Para calcular el valor de
un fusible se puede utilizar la siguiente formula:
Fusible = 1.25 x 1 del circuito. Como sabemos la 1 representa a la corriente la
cual se debe multiplicar por la constante 1.25 y así obtenemos el valor del
fusible, que debemos utilizar para ese equipo electrónico en particular.
Por ejemplo, tenemos un equipo electrónico que hace circular una corriente de
2.7 A. Entonces tenemos que la 1 Fusible = 1.25 x 2.7 A = 3.4 Amperios,
entonces el fusible indicado para una corriente de 2. 7A debe ser uno de 3.4
Amperios. Nótese que este valor es de O. 7 Amperios superior al consumo del
aparato, ya que si se coloca un fusible de un valor exacto al consumo,
entonces este también se quemara.
12.3 El varistor
Los varistores proporcionan una protección fiable y económica contra
transitorios de alto voltaje que pueden ser producidos, por ejemplo, por
relámpagos, conmutaciones o ruido eléctrico en líneas de potencia de
ce
o
CORRIENTE AL TERNA.
Los varistores tienen la ventaja sobre los diodos (supresores de transitorios)
que, al igual que ellos pueden absorber energías transitorias (incluso más
altas) pero además pueden suprimir los transitorios positivos y negativos.
iP
144
Cuando aparece un transitorio, el varistor cambia su resistencia de un valor alto
a otro valor muy bajo. El transitorio es absorbido por el varistor, protegiendo de
esa manera los componentes sensibles del circuito.
Actúa como una resistencia dependiente de la tensión, ya que varía su
resistencia de acuerdo a la tensión (voltaje) aplicada entre sus extremos. La
propiedad que caracteriza a esta resistencia consiste en que cuando aumenta
la tensión aplicada entre sus extremos esta rápidamente disminuye su valor
óhmico. Frente a picos altos de tensión se comporta casi como un cortocircuito.
Los varistores son construidos para diferentes valores de tensión de ruptura.
Tienen una amplia gama de voltajes, que van desde 14v a 550v (RMS).
FIGURA No 12.4 Varistor de óxido de metal (MOV)
FIGURA No 12.5 Símbolo del varistor
Estos en la electrónica son utilizados para proteger los componentes más
sensibles de los circuitos contra variaciones bruscas de voltaje o picos de
corriente que pueden ser originados, entre otros, por relámpagos, interferencia
electromagnética, conmutaciones y ruido eléctrico.
La relación entre la tensión y corriente en un varistor viene dada por:
v =ex 1b
~145
LIMITACIÓN DE TRANSITORIOS DE TENSION CON VARISTORES DE ZnO
En la figura el voltaje de alimentación Vi es derivado por la resistencia R (p. ej.
la resistencia de línea) y el varistor (-U) seleccionado para la aplicación.
A
vn
VI
FIGURA No 12.6 Conexión del MOV
v1 =R x 1 + e x 1b
Si la tensión de alimentación varía una cantidad DV1 la variación de corriente
será de DI y la tensión de alimentación podrá expresarse como:
(V1 + DV1 )=R x (1 + DI) + e x (I+DI)b
Dado el valor pequeño de b (0.03 a 0.05), es evidente que la modificación de C
x lb será muy pequeña comparada a la variación de R x 1 cuando V 1 aumente a
V 1+
DV1.
Un aumento grande de V1 conduce a un aumento grande de VR y un aumento
pequeño de Vo
12.4 Diodo zener y de avalancha
El diodo zener es un diodo que tiene un voltaje de avalancha
relativamente bajo, menor de 100v. Aunque puede funcionar como
rectificador la mayoría de aplicaciones se basan en hacerlo funcionar en
la zona de avalancha, allí el diodo conduce y mantiene un voltaje entre
sus terminales que es el voltaje Zener (VZ) o de avalancha. La máxima
corriente que puede conducir es:
1
111!/ZK
= PDmQJI
V.
z
FIGURA No 12.7 Diodo Zener forma física
An_od_e_-t[:::f:.~__c_a_thode
FIGURA No 12.8 Símbolo del Diodo Zener
12.5 Elemento de protección con diodo zener
Esta protección consiste en utilizar la cualidad de enclavamiento propia de este
tipo de diodos. Por ejemplo si en una línea de voltaje DC se desea que el
voltaje no sobrepase un voltaje de 5.1 voltios, entonces debemos utilizar un
diodo Zener de este valor. Este sistema se utiliza generalmente para proteger
las entradas de circuitos digitales que no deban superar este voltaje, también
se puede hacer uso de la característica de voltaje de ruptura en donde el diodo
zener, una vez sea sobrepasado su valor nominal de voltaje este conducirá el
voltaje del cátodo hacia el ánodo
Un diodo
avalancha,
es
un
dispositivo semiconductor diseñado
especialmente para trabajar en tensión inversa. En estos diodos, poco
dopados, cuando la tensión en polarización inversa alcanza el valor de la
tensión de ruptura, los electrones que han saltado a la banda de
conducción por efecto de la temperatura se aceleran debido al campo
eléctrico incrementando su energía cinética, de forma que al colisionar
con electrones de valencia los liberan; éstos a su vez, se aceleran y
147
colisionan con otros electrones de valencia liberándolos también,
produciéndose una avalancha de electrones cuyo efecto es incrementar
la corriente conducida por el diodo sin apenas incremento de la tensión.
FIGURA No 12.9 Diodo avalancha
Elemento de protección con diodos de avalancha
La aplicación típica de estos diodos es la protección de circuitos electrónicos
contra sobretensiones. El diodo se conecta en inversa a tierra de modo que,
mientras la tensión se mantenga por debajo de la tensión de ruptura, sólo será
atravesado por la corriente inversa de saturación, muy pequeña, por lo que la
interferencia con el resto del circuito será mínima; a efectos prácticos, es como
si el diodo no existiera. Al incrementarse la tensión del circuito por encima del
valor de ruptura, el diodo comienza a conducir desviando el exceso de corriente
a tierra evitando daños en los componentes del circuito. Este diodo presenta
una gran impedancia y no se puede medir con la mayoría de los multímetros
comunes.
CONEXIÓN COMO CIRCUITO DE PROTECCIÓN (ZENER Y AVALANCHA)
circuito
FIGURA No 12.1 O Conexión como circuito de protección
12.6 Circuito detector de sobre corriente (OCP)
El circuito que presentamos a continuación tiene como función principal
determinar en que momento se supera un valor establecido de corriente.
y
148
Cuando valor es superado, el valor de voltaje resultante se aplica a la entrada
de un circuito integrado, el cual desactivara la alimentación principal del equipo
para evitar daños posteriores. La sigla OCP proviene del inglés "Over Current
Protection" o en español "protección contra sobre corriente". Comúnmente se
utiliza una resistencia de bajo valor o la suma de varias de ellas, con el fin de
provocar una caída de voltaje, el cual es proporcional a la corriente que circula
por el circuito, tal como se puede ver en la siguiente imagen.
r
FR1
A407
tOKI'o. 'l!iW
1
RS
CC07
L
A409
:1
SCkF~-=---J
Proteccíon por sobrecorrí'ente (OCP}
FIGURA No 12.11 Circuito detector de sobre corriente
Funcionamiento: La resistencia FR1 sensa la caída de voltaje debido al paso
de la corriente por ella. Dicho voltaje es llevado a la base del transistor PNP
0403 por medio de la resistencia R407 y filtrado por el condensador C409, lo
cual provoca que el transistor sea encendido. La salida del circuito será por
medio de R408 y R409, el voltaje saliente se utiliza para encender un segundo
transistor ahora del tipo NPN o también para llevar el voltaje directamente a la
entrada de un circuito integrado, para que este detecte el error que se está
produciendo y apague inmediatamente el equipo.
12.7 Circuito detector de sobre voltaje (OVP):
Su función es la de detectar un aumento en el voltaje nominal de un circuito .
con el fin de evitar su destrucción. La sigla OVP proviene del ingles Over
voltage Protection o en español protección por sobrevoltaje,
149
Un ejemplo de este circuito es al que a continuación se presenta
Vref
Yt
I
I
FIGURA No 12.12 Circuito detector de sobrevoltaje
Funcionamiento:
Básicamente se trata de fijar un voltaje de referencia que puede ser un
porcentaje del voltaje del que no se quiere superar. Para esto se suele utilizar
un amplificador operacional, que puede ser individual o también puede hacer
parte de un circuito integrado que contiene otras funciones, como el caso de los
circuitos integrados conmutadores de las fuentes de alimentación en aparatos
comerciales.
Fijado el voltaje de referencia se debe tomar otra muestra del mismo voltaje, el
cual ingresara por la segunda entrada del amplificador operacional, si este
voltaje es mayor que el voltaje de referencia, entonces la salida pasara a un
estado alto de lo contrario quedara en estado bajo, e inclusive proveer un
voltaje negativo. Esta situación es interpretada por un microprocesador o
similar para tomar la decisión de apagar el equipo electrónico.
También tenemos el siguiente circuito que usa un diodo zener y un fusible
como medio de protección, este circuito se desarrolla debido a que los
dispositivos de
2N1595
F1
.
f
BZD23- C5\16
e;
,
>
4.7k
FIGURA No 12.13 Circuito de protección con SCR
·~
Vload
~150
Seguridad como fusibles proporcionan protección contra exceso de corriente,
pero no hacen nada para transitorios y picos de corta duración de alta tensión
en el circuito. Esta fuente de alimentación utiliza el método de "palanca" y
proporciona una protección rápida contra tensión transitoria picos, transitorios
que
podrían
causar
daños
a
los
componentes
sensibles.
Funcionamiento:
El tiristor activará en unos pocos microsegundos. Esto es más de 1.000 veces
más rápido que un fusible de acción rápida ordinaria. Si la tensión de salida
excede el límite establecido por el zener, entonces se llevará a cabo. La
tensión en la resistencia de 4. ?k subirá, el tiristor se enciende y los carriles de
alimentación están en cortocircuito. La duración del corto circuito será sólo
unos pocos milisegundos antes de que el fusible se quema. En estos pocos
milisegundos se reducirá en gran medida la tensión.
12.8 Protección contra bajo voltaje (UVP):
Esta protección consiste en detectar cuando un voltaje se encuentra por debajo
de un cierto valor de referencia, con lo cual se activa o desactiva algún otro
circuito. UVP proviene de la sigla en ingles Under voltage Protection o en
español Protección contra bajo voltaje,
Para comprender su funcionamiento veamos la siguiente imagen.
R1
1K
T1
9C557
C1
10UF
25V
\IR
5K
\o
\o
LEO
Red
FIGURA No 12.14 Protección contra bajo voltaje
,151
Funcionamiento:
Cuando el voltaje es mayor a 12v, el diodo Zener de 1Ov conduce por voltaje de
ruptura, colocando en la base del transistor PNP un voltaje fijado por el resistor
variable. El transistor se apaga y a su vez mantiene sin alimentación al diodo
LEO, cuando el voltaje disminuye por debajo de 1Ov, el voltaje en la base
desaparece y el transistor se enciende alimentando al diodo LEO con lo cual
este brillara. Además de servir de protección, también se utiliza como indicador
de batería baja por ejemplo.
Debido a la frecuencia de estos problemas de picos transitorios de voltaje se
comercializan distintos equipos para la protección de los componentes internos,
estos puede ser:
Regulador:
La función del regulador de voltaje es la de proteger los
aparatos eléctricos y electrónicos contra altos y bajos
voltajes, y además, protege contra picos de voltaje en la
línea telefónica que se conecta al modem de la
computadora o al aparato de Fax.
FIGURA N°12.15 Regulador
Se le puede conectar cualquier electrodoméstico que se desee cuidar
Supresores de pico:
Es
un
dispositivo
de
desvío
de
energía,
recortando el valor pico de la forma de onda de
voltaje, desviando este exceso de energía para
no dañar la carga sensible, y mantener el voltaje
de
la carga libre de transitorios.
Un supresor de picos protege los equipos a
eventuales picos de voltaje que en la mayoría de
los casos los dañan.
FIGURA No 12.16 Supresores de pico
P:s2
Estos supresores de picos deben acompañarse con circuitos pasa banda que
eliminen o atenúen las señales armónicas que también son fatales para la
mayoría de los equipo
La función de supresión de picos, consiste en proteger los equipos conectados
sólo contra los breves pulsos de voltaje (de duración menor a un segundo) que
suelen existir en la línea de alimentación eléctrica, telefónica y señal de
televisión. Cabe hacer notar que los multicontactos con supresor de picos, no
son reguladores.
No break:
Significa "Sin Interrupción", es un equipo que al cortarse la energía eléctrica,
comienza a funcionar y suple la energía externa al equipo al cual se conecta.
Por ejemplo un PC que si se corta al cortarse la energía puede fallar si no se
cierra y apaga normalmente. Tienen una duración limitada dependiendo de la
capacidad
de las baterías que posee.
Regula la corriente, y en el caso de que se suspenda
por completo la energía, puede proveer de suministro
de energía en periodos que dependiendo de la
capacidad del aparato van desde minutos hasta
FIGURA No 12.17 No break
horas.
UPS:
de Energía
EISistema
también uninterruptible
Inglés), battery
backup o
Ininterrumpida, llamado
power
suply
conocido
(en
simplemente
como ups es un dispositivo que provee y mantiene
energía
eléctrica
de
respaldo
en
caso
de
interrupciones eléctricas o eventualidades en la línea
o acometida.
FIGURA No 12.18 UPS
Sirve para poder seguir trabajando en la computadora por una cierta cantidad
de tiempo aun después de ocurrir una interrupción en la electricidad.
~153
Cumplen la función de mejorar la calidad de la energía eléctrica que llega a las
cargas, como el filtrado, protección de subidas (picos de tensión), bajadas de
tensión (caídas), apagones y eliminación de corrientes parasitarias como ruidos
EMI y RFI, disrupciones de energía, perdida de data, etc
Fusible programable
En todo diseño electrónico, los sistemas de protección poseen un papel muy
importante. Los accidentes e imprevistos son habituales en equipos industriales
o en aquellos que son operados por muchas personas. Un cortocircuito o una
sobrecarga
no deseada (ni esperada) pueden destruir un sistema de
alimentación y, en el peor de los casos, puede ocasionar graves accidentes.
El circuito integrado NIS5112 es un fusible electrónico (electronic fuse) ideal
para aplicaciones en automóviles y para toda aquella utilidad que necesite una
alimentación de 12Volts. A pesar de tener un encapsulado SOIC8, la
tecnología SENSEFET le permite al NIS5112 trabajar con corrientes de hasta
5A. En desarrollos donde el espacio, la confiabilidad y el costo reducido son
muy importantes.
Aplicaciones
La aplicación y el desarrollo de sistemas de protección en equipos electrónicos
no son tan sencillos como la gente puede creer. Casi a diario suceden
problemas de funcionamiento en productos domésticos (TV, DVD Player,
Videogames, etc) y las personas siempre están convencidas de que es un
fusible lo que se ha roto o "algún cablecito suelto" que anda por allí. El clásico
fusible que viene encapsulado en una ampolla de vidrio con dos casquetes
metálicos que le sirven de conexión se rompe en ocasiones muy puntales y
poco frecuentes. Es necesario que dentro del equipo exista un cortocircuito
muy importante para que el fusible se deteriore y proteja así el circuito de
alimentación; de lo contrario, se rompen muchas cosas dentro de cualquier
aparato antes de que se destruya un fusible.
Podríamos agregar, además, que /as fallas que se provocan en el interior del
equipo rompen componentes. Y cuando se llega al punto de una destrucción
masiva donde /os cortocircuitos son graves, hace su ingreso a escena el fusible
r154
salvador para que el equipo no se prenda fuego ni explote (porque la rotura ya
se produjo). Es decir, el fusible clásico, en la mayoría de los casos, brinda una
protección limitada. La verdadera acción preventiva la realizan los circuitos
inteligentes que todo equipo elaborado posee y, por supuesto, aquellos que
podrás diseñar a partir del uso deiNIS5112.
Características
El NIS5112 es un circuito integrado de ON Semiconductor que se comercializa
en un encapsulado SOIC8.. Entre una de sus cualidades, la primera es la
posibilidad que te brinda el NIS5112de ajustar la corriente de trabajo o de
acción y protección mediante una simple resistencia de poca potencia de
disipación y de un preset (resistor ajustable). En el circuito mostrado arriba, que
se encuentra en las hojas de datos del componente, puedes observar la
resistencia de 56 Ohms que el fabricante ofrece como referencia de
demostración en el circuito planteado. En función del valor que adopte esta
resistencia, se obtendrá la corriente de trabajo o de acción del fusible
electrónico. En las hojas de datos no se encuentran fórmulas ni cálculos para
determinar el valor apropiado (de la resistencia) en función de la corriente de
trabajo (de protección) que se quiera adoptar. Sólo se encuentra una gráfica
(Fig.2, Pág. 4) donde se muestran dos curvas específicas. Una, "1/imit_SS",
indica la corriente de acción del fusible en función de la resistencia !imitadora o
de "sensado". La otra, "llimit_ OL", indica la corriente de sobrecarga a la que
actuará el fusible.
La comprensión del siguiente gráfico nos permitirá acceder a todas las
posibilidades que nos brinda el NIS5112. 1/imit_ OL es la curva que representa
la corriente a la cual el circuito detectará un sobre-consumo excesivo y actuará
en consecuencia. Esto es, un valor comprendido entre 3,5A y 5,5A, en función
de la resistencia /imitadora. Es decir, por lo que muestra el gráfico, con una
resistencia !imitadora de 75 Ohms el fusible actuará a los 4 Amperes
desconectando la alimentación a la carga.
Esta desconexión (como se aprecia en el segundo video) puede ser temporal o
permanente. Es decir, si el lapso de tiempo en que se produce el inconveniente
?'
155
es de duración breve, el fusible se repone de manera automática. Por el
contrario, si nos encontramos ante un problema prolongado en el tiempo, el
fusible cortará la alimentación a la carga de manera permanente y solo
podremos restablecer la alimentación desconectando el
100
10
luMIT_OL
!"""'-
.........
ILIMIT_SS
o
10
100
1000
AextiUmH (~"!)
FIGURA N°12.19 Circuito, volviendo a conectarlo (el clásico "apagar y volver a
encender').
Por otro lado, la curva 1/imit_SS nos ofrece información sobre cuál será la
corriente de arranque (de inicio) que podremos obtener en función de la
resistencia !imitadora. Es decir, de acuerdo al valor que le asignemos a la
resistencia !imitadora, el fusible permitirá alimentar al circuito o impedirá esta
acción por encontrar una carga (consumo al momento de la conexión) fuera de
los valores ajustados al inicio del diseño. Al igual que en la curva anterior,
podemos deducir entonces que: con una resistencia !imitadora de 330 Ohms,
el NIS5112 sólo permitirá alimentar circuitos que consuman 500mA de manera
aproximada.
Si la corriente inicial supera este valor, el fusible electrónico no permitirá el
paso de la alimentación proveniente desde la fuente conectada a la red o
desde una batería. De este modo, se deben razonar las curvas para
comprender el funcionamiento del NIS5112 y poder sacar el máximo provecho
de él. Veamos ahora cómo se comporta ante un cortocircuito directo.
1'
156
•
•
1
•
.
•
•
1
•
•
•
.. ..
.·. j..... ·,.......
•
•
'
,. "' ..
1
..
t
•
•
•
•
~ 1 •
•
•
•
-
•
•
•· •
.-
,., ...
,. .. •
•
•
•• • •
•
.
~
. • • ;¡,
1
~
• • •••
FIGURA No 12. 20 Circuito con CI.NIS5112
Continuando con la descripción de las características del NIS5112, nos
encontramos con la posibilidad de trabajar con tensiones comprendidas entre 9
y 18 Volts para una operación apropiada, con valores transitorios (en picos de
tensión) de hasta 25Volts (1 mS). La tensión máxima que el fusible entregará al
circuito con el que trabajará será de 15Volts. Y todas las excursiones por sobre
este valor serán "recortadas" a ese nivel. Esta propiedad lo hace ideal para
aplicaciones automotrices, donde la alimentación de 12Volts sea un común
denominador entre los circuitos operativos.
Por otro lado, la corriente máxima nominal que el NIS5112 permitirá drenar
sobre un circuito será de 5,3A, según su hoja de datos, y los picos transitorios
podrán alcanzar valores de hasta 25A. El siguiente circuito es el que te
mostramos en el video, con la diferencia de que en nuestro caso, por trabajar
con entrada de tensión desde una batería de 12Volts, no incluimos a C4 y C3
en el montaje. Además, el tipo de carga con la que hicimos el ensayo no
ameritaba la inclusión necesaria de estos capacitares. Siempre aconsejamos
colocarlos; por lo tanto, no debes dejar de instalarlos donde indica el
esquemático.
Funcionamiento
Gracias a la tecnología SENSEFET, se puede contar con un transistor
MOSFET de potencia con protección por temperatura que, en ese aspecto,
tiene la capacidad de protegerse a sí mismo. Dotado con una resistencia de
.P
157
conducción muy baja (30 miliOhms), este transistor le brinda al NIS5112 la
ventaja de interrumpir su funcionamiento cuando la temperatura ha cruzado un
límite de riesgo. En el segundo video puedes observar una secuencia donde se
plantea esta situación. Cuando la resistencia de carga pone al fusible al límite
de
su
ajuste
de
corriente,
la
temperatura
comienza
a
aumentar,
el MOSFET comienza a disminuir su rendimiento, los LEOs encienden menos,
y la temperatura alcanza en pocos instantes el nivel suficiente como para que
el NIS5112 active su sistema de auto- protección. Esta temperatura máxima es
de 135°C. Y sólo si baja 40°C, el circuito integrado volverá a estar operativo
para continuar con su trabajo. Es decir, si la situación del circuito no cambia, el
dispositivo estará auto-protegiéndose de manera indefinida hasta que nos
demos cuenta de que una situación de sobrecarga está ocurriendo en el
circuito al momento de energizar la carga útil que deseamos alimentar.
Por último, encontramos el pin Enable/Timer que hace que el NIS5112 se
comporte como una verdadera llave de encendido. Con un estado lógico alto,
nos asegura la habilitación del circuito integrado. Y con un estado lógico bajo,
deshabilita su funcionamiento colocándolo como una llave abierta. En el caso
de que no se le aplique algún tipo de estado lógico y se coloque allí un
capacitar, se obtendrá un retardo de tiempo hasta activar la salida de tensión.
Este retardo estará asociado al valor del capacitar allí conectado.
Es decir, si todas las virtudes que destacamos hasta aquí del NIS5112 te
parecieron pocas, también puedes utilizarlo como llave de encendido para
activar (o no) sub-sistemas que trabajen con 12Volts. Y hasta puedes
programar un pequeño retardo de activación. El pin dV/dt (asociado en el
funcionamiento al pin Enable/Timer) lleva conectado un capacitar que
determina la velocidad en que el SENSEFET pasa a un estado de conducción
plena. Observa en las hojas de datos que esto está expresado como una
pendiente de subida ante el impulso escalón de entrada de tensión. El
capacitar colocado en este pin determina la velocidad de crecimiento de esta
rampa.
158
V. REFERENCIALES
DANIEL W. HART, ELECTRÓNONICA DE POTENCIA, 10° EDICIÓN 1
EDITORIAL PEARSON 1 PÁG. 206- 306. 201 O
MOHAN,
UNDELAND
Y
ROBBINS,
"POWER
ELECTRONICS:
CONVERTERS, APPLICATIONS ANO DESIGN", NUEVA YORK, JOHN
WILEY & SONS, 2a ED, 1995.
AKAGI FIROFUMI, THE STATE OF THE ART OF POWER ELECTRONICS IN
JAPAN. TRANSACTIONS ON POWER ELECTRONICS, IEEE VOL. 98
VOL.N°6, JUNIO 2001,
159
VI. APENDICES
TABLA No 01
PARAMETROS DE LOS TRANSISTORES DE POTENCIA
Parámetros
MOS
Bipolar
Impedancia de entrada
Alta (1 01 O ohmios)
Media (1 04 ohmios)
Ganancia en corriente
Alta (107)
Media (10-100)
Resistencia ON (saturación)
Media 1 alta
Baja
Resistencia OFF (corte)
Alta
Alta
Voltaje aplicable
Alto ( 1000 V)
Alto ( 1200 V)
Máxima temperatura de operación Alta (200°C)
Media (150°C)
Frecuencia de trabajo
Alta (100-500 Khz)
Baja (10-80Khz)
Coste
Alto
Medio
TABLA No 02
COMPONENTES DE LA FUENTE DE PODER OC - AC
R11 kO
C1 4700
¡.~F
Puente
rectificador
6A
1000V
R2100 O
C2 10 IJF
01 1N4735A Zener 6,2V 1W
R3 470 O
C3 10 nF
06 1N4742A Zener 12V 1W
R41 kO
C4 10 nF
T1 BC549
R5 220 O
C5 470 IJF
T2 TIP29
R61 kO
C6 47 nF
T3 2N3055
R7 4.7 kO
transf 20v
T4 2N5060
160
RECTIFICADOR MONOFASICO SEMICONTROLADO
lntroducción.Los Rectificadores Semicontrolados son un tipo de convertidor de un sólo
cuadrante y tiene una misma polaridad de voltaje y de corriente de salida.
Emplean en sus configuraciones ramas rectificadoras con, cada una de ellas,
un diodo y un tiristor. Estos convertidores no necesitarán, por lo tanto, de doble
encendido en los tiristores, como ocurre en los rectificadores controlados,
dando una característica de salida con más ondulación que sus equivalentes
montajes a tiristores.
Desarrollo.Lo primero en el diseño de nuestro circuito fue el transformador reductor para
adecuarlo a un voltaje útil para la alimentación de las siguientes etapas como
Vcc, además de generar nuestras señales de control y de comparación.
Utilizamos un transformador reductor de 120V/12V,
para la generación de
nuestras señales de control, en esta etapa usamos diodos rectificadores
normales y en los divisores de voltaje para Va y Vb resistencias del mismo
valor para obtener la media de tensión y en valores de Kilohmios para el control
de la corriente.
X1
vcc
R2
10kD
+
R1
~
-
100k0
R3
10kD
4 0%
.
110 Vrms
60Hz
R10
<kD
VEE
-12V
VCC
12V
FIGURA AP N°1 Circuito monofásico semicontrolado
p
161
Diagramas en el Osciloscopio.Tekhoonix Oscilloscopo:-XSCZ
[)
c:J
o
a
a
0
·01
<'OWU
FIGURA AP N°2 Forma de onda con angula de disparo a1
FIGURA AP N°3 Forma de onda con Angula de disparo a2
Conclusión.•
Pudimos observar que es crítico en el diseño de estos circuitos, tener en
cuenta el valor exacto de todos sus componentes pues una mínima
variación puede tener un grande efecto en el valor y la forma de la
salida.
162
•
Algunos de los elementos utilizados no nos dieron la respuesta esperada
debido a que no tuvimos en cuenta las curvas características y las
especificaciones propias de cada dispositivo por lo que se calibraron
estos valores algunas veces al tacto.
•
En esta aplicación que era para laboratorio y no era de importancia
crítica en el funcionamiento de alguna máquina o equipo se pudo
realizar de esta manera pero en aplicaciones de la vida real, todos los
cálculos y mediciones deben ser exactos.
163
MODULACION POR ANCHO DE PULSO
lntroduccion.EI pwm
se ubican en la electrónica de potencia en el campo de la
conversión energética, en concreto en la conversión continua - alterna
(DC/AC).La evolución que han experimentado los semiconductores, en
términos de frecuencia de conmutación, pérdidas en conducción y
facilidad de gobierno ha contribuido en gran medida a la popularización
de este tipo de convertidores y de su evolución. En este tipo de equipos,
de mediana 1 alta potencia, la tendencia es
disminuir los costes y
aumentar la eficiencia, (frente a la tendencia en la línea de baja
potencia, en la cual se prima la miniaturización), objetivo que pasa por la
optimización de los dispositivos semiconductores empleados; por otro
lado, el auge experimentado en el Campo de la electrónica digital, ha
permitido que los procesadores estén al alcance de los diseñadores a
muy bajo coste y con potentes herramientas de depuración y desarrollo.
De esta manera, se pueden plantear estrategias de control complejas sin
aumento apreciable en los costes finales del equipo.
Diseño.-
01
02
1N4004
1N4004
03
D4
1N4004
1N4004
R1
11<0
RS
Key=A
2.21<0
R10
11<0
100%
FIGURA AP N°4 Circuito modulador por ancho de pulso (PWM)
164
I_R_
.L • • - - - · - · ' " · · - · · · · · ' - - - - - - -
''
''
''
---••
_ _ _ _ _ _ _ _ _ Jt
~~ ~~~
T2 ""~
~~
12-TI
Trne
90.011m:;
90.014ms
O.OOJ s
Chomei..A
S.!ill! V
8.509Y
0.000 V
1-1
Cl>orlr>B.Jl
11.027V
1L027V
0.000 'J
~
Clvlmo(B~
·Sedo:
10
v¡n;,
Scolo:
Ypo<.(Dlv):
Ypo<.(Dlv): O
_
lO Y¡rtrv
·2.6
T-
Eilge:
~:
Ext.tJWer
0l9 0Chlfril
¡¡------y-
FIGURA AP N°5 Forma de onda con PWM1
Ooooroo!_A
Chomei_D
337.855 mV
337.855 m'tl
O.OOOY
972.825 mY
972.825 mY
O.OOOY
~--- Chomel A
dlamEIB
1Scale: S m:;~ Scale: 10 V~ Scale: lO ~ Eilge' l;t)l9
Xpos.()liw): O
Ypos.(l)jy): O
Ypos.(lliv): ·2.6
l.eYd:
0
1 liiiJ[Adiil [BP:][A.il [AC][O]¡j!J
@
fACI[Q]~r::l @ T\'110
0J'J@;j]
y
¡so;;¡ [lb.] ¡;.u¡;;] liiii~l
FIGURA AP N°6 Forma de onda con PWM2
Conclusiones.EI circuito puente de los diodos que esta al inicio del circuito nos generan :
rectificación de la onda, sincronización con la red eléctrica.
En la primera parte del circuito se debe tener en cuenta que los pulsos crucen
por cero la onda rectificada.
165
CIRCUITO DE CONTROL DE POTENCIA
lntroduccion.Los
motores de corriente alterna son dispositivos de velocidad, ésta puede
variar si se cambia el voltaje de entrada o la frecuencia o las bobinas que
hacen que el motor gire. La forma más común y eficiente de cambiar la
velocidad es variar la frecuencia, mediante el uso de un inversor como la fuente
de alimentación. Este método se ha popularizado con el desarrollo y la
disminución en el costo de los sistemas de poder. Los métodos que implican la
reducción
del
voltaje
en
los
bobinados
del
motor
con
resistencias,
transformadores o sistemas de bobinado, para motores todavía están en uso y
los métodos preferidos y de bajo costo para ciertas aplicaciones bien definidas.
Diseño.-
VO<
R3
R5
R2
R6
2.2k
VO<
2.2k
""
330R
7
~
TR1
ctJ
R9
1221<
C1
'"'
~"
12V
TRAN-2P3S
"'"
RV1
•
•
R7
10k
220R
R13
330R
7
7
7
R12
03
1k
7
FIGURA AP N°7 Circuito para hallar la velocidad de un motor de C.A.
166
•
ANALOGUE AI-MLYSIS- PROSPICE
_f!l~. View _G_raph_ , O~_?n!i.
~elp _
FIGURA AP N°8 Forma de onda con PWM1
::::r~~~~,:---1--- - -!--~
·~-·
---
1
1C.B--~
FIGURA AP N°9 Forma de onda con PWM2
Conclusiones.Si se desea controlar la velocidad de un taladro o un ventilador (motores de
corriente alterna), Muchos de estos circuitos reguladores de potencia tienen un
punto de encendido y apagado que no coincide (a este fenómeno se le llama
histéresis), y es común en los TRIACS. Para corregir este defecto se ha
incluido en el circuito los resistores R1, R2 y C1.EI conjunto resistor R3 y
capacitar C3 se utiliza para filtrar picos transitorios de alto voltaje que pudieran
aparecer. La maquinaria industrial generalmente es accionada a través de
167
motores eléctricos, a velocidades constantes o variables, pero con valores
precisos. No obstante, los motores eléctricos generalmente operan a velocidad
constante o cuasi-constante, y con valores que dependen de la alimentación y
de las características propias del motor, los cuales no se pueden modificar
fácilmente. Para lograr regular la velocidad de los motores, se emplea un
controlador especial que recibe el nombre de variador de velocidad. Los
variadores de velocidad se emplean en una amplia gama de aplicaciones
industriales, como en ventiladores y equipo de aire acondicionado, equipo de
bombeo, bandas y transportadores industriales, elevadores, llenadoras, tornos
y fresadoras, etc.
168
VIl. ANEXOS
169
APPLICATION NOTE
SPEED CONTROL OF OC MOTORS
WITH THE L292 SWITCH-MODE DRIVER
Power dissipation in OC motor drive systems can be reduced considerab/y wíth an L292 swítchmode driver.
This app/ícation guide describes two speed control systems based on this de vice ; one voltage control/ed
and one contro/led by a 6-bit binary word. 8oth examples are designed for 60 W motors equipped with tacho
dynamos.
The L292 is a monolithic power IC which functions
effectively as a powertransconductanceamplifier. lt
delivers a load current proportional to an input voltage, handling up to 2A at 18-36 Vwith a bridge output stage. Completely self-contained, it incorporates
intemal switchmode circuitry and all the active components to forma current feedback loop.
The L292 is designed primarily for use with an L290
and L291 in OC motor servopositioning applications. However, the L292 can be useful in a wide
range of applications as the two examples here
show. The first is a simple tachometerfeedbackcircuit, the speed ofwhich is controlled by a OC voltage
; direction is controlled by the polarity of this voltage.
The second circuit is controlled digitally and includes
an L291 0/A converter.
SYSTEM WITH OC CONTROL
In this system the control quantity is a de voltage variable between
+ V¡M and - V¡M
Sin ce the quantity under control is the speed of the
motor, it is required that it varies linearly in function
ofthe control voltage.
A simplified circuit diagram of the system is shown
in fig. 1.
The current 11, proportional to the set voltage V¡, and
the current lz, proportionaltothe speed ofthe motor,
are fed to the su m point of the error amplifier. Assuming that the motor does not drain current, the system is in a steady-state condition whenever l1 =lz ; as a matter of fact, in this case the output from
the error amplifier V o is OV. During transients, the
voltage Vo will assume a val ue V o=- R3 (11 + lz} and
consequently, since the L292 integrated circuit operates as a transconductance(Gm), a mean current
lm Gm . Vo will flow in the motor determining an acceleration proportional to it.
=
AN241/1088
Figure 1 : Simplified Circuit Oiagram of OC control
System.
RZ
~-CALCULATION OF R1, R2, R3
Let us call:
V¡ M
the maximum control voltage value
the maximum speed allowed for the motor
Kg
voltage constant of the dynamo
By imposing that the balance condition be met in
correspondancetothe maximum rotation speedthe
following equation is obtained :
V¡M
K 9 . nM
R1
R2
11 =-lz; . - - = - - - Since R2 is the impedance which the tachometer
dynamo is loaded on to and its value is recommended by the manufacturer, it is possible from the previous relationship to determine the val u e of R1.
Resistor R3 determines the system gain. lt's best to
keep the gain as high as possible (and consequently
R3 as high as possible) to obtain a high response
speed of the system, even of for small variations in
the control voltage. On the otherhand, an excessive
gain would cause excessive overshoot around the
balance conditions at the end of transients. Consequently, a trade-off must be made between the two
opposing requirements in selecting the final gain.
1/9
APPLICATION NOTE
The val u e for R3 should be theoretically determinad
by studying the transfer function, by knowing the
electrical and mechanical constants of the motor as
well as the load applied to it.
A complete diagram ofthe circuit actually realizad is
shown in fig. 2, while fig. 3, shows the characteristic
n f (\/¡) obtained.
=
Resistor R2 drawn in the simplified circuit diagram
has been split here in two parts and, in addition, a
capacitar has been interposed to ground to filter the
signal coming from the tachometer dynamo.
The curven. 1 in fig. 3 refers to the operation ofthe
motor in no-load condition, with a current drain of
200 mA ; the curve n. 2 refers toa motor loaded so
asto drain a current of 1A. By disregarding the discontinuityaroundthe origin, itcan be notedthatthe
characteristics are linear over the whole control voltage range.
By analyzing the curves around the origin, it can be
noted that the motor stands still as long as the input
signal does not exceed a certain threshold level,
which is as much higher as the current drained by
the motoris higher.
Let us call Gm the transconductanceof L292, and 1
the starting current ofthe motor; the voltage which
must be available at the input of L292 in arder that
the motor starts turning is :
mA
1
Vo= Gm with Gm = 220 --.;¡- (typical value)
The corresponding control voltage will be :
R1
1
R3 -
V¡=Vo ·
R3
and it is as much lower as the gain of the error amplifier is higher.
The presence of a control voltage interval in which
the motorstands still, can be useful when it is required that, for a certain position of potentiometer P1(see fig. 2), the motor speed be zero. An other method to hold the motor still is to use the inhibits of
L292, for instance by grounding pin 13.
Figure 2 : Complete Circuit Diagram.
::::!·1 pF
.2..0.
S..-
01
2/9
R1
+
04
{
VF
~
trr
~
1.2 V @ 1 = 2 A
200 ns
APPLICATION NOTE
lt can be noted from fig. 3 that, by keeping the control
voltage V¡ constant, the speed varies according to
the motor current drain.
Let us call ~1 the current variation ; the voltage variation required at the input of L292 is
~1
~Vo=--
Gm
since the control voltage is constant, to generatethis
it is necessarythatthe rotation speed be varied
by a quantity ~ n such as to have :
~Vo
R3
Kg . ~ n • R2
~
~
1
=~ Vo =Gm
1
lt is possible to adopta circuit which prevents the variation in the numberofturns in function ofmotor current. The problem is to "sen se" the current flowing
throughthe motor and to senda current proportional
to it to the sum point of the error amplifier. The complete circuit which includes, beside the voltage feedback loop, also a current feed-back loop, is
illustrated in fig. 4.
In the integrated circuit L292, a current proportional
to the mean current drained by the motor flows between pin 5 and pin 7.
R2
~n=---
Gm Kg
(~
In this case too, the variation ~ n is as m ueh lower
as the error amplifier gain is higher. With the circuit
showninfig. 2~n isapproximately30 tums/min. with
~ 1 = 800 mA, ~n = 0.037 tums/mA.min approx.
R3
1 shall be taken with its sign)
Figure 3 : Output Characteristics of the Circuit in
fig. 2.
-
,,.....•
An operational amplifier amplifies the voltage drop
provoked by this current across a 51 OQ resistor and
sends a current to the su m point which is consequently proportional to the mean current in the motor, the value of which can be made vary by acting
on potentiometer P2. By properly adjusting P2, a
condition can be achieved in which the speed does
not change when the current drained by the motor
varies .
The discontinuity around the origin, which was present in the previous circuit (fig. 2), is practically negligible in the circuit shown in fig. 4.
=
4
1
1
111 W!IWI
.....
---
-
...
The characteristic n f (V¡) relevant to the circuit of
fig. 4 is shown in fig. 5, and this characteristic does
not substantially change over the whole range of
currents allowed by the L292 (up to 2A).
In the circuit described above ifthe motor stall condition is requested. lt is preferable to act on the inhibits of the integrated circuit L292, for instance by
grounding pin 13, instead of adjusting potentiometer
P1 :as a matteroffact, the exact position ofthis potentiometer is difficult to obtain, since the characteristic crosses the axis V¡ in one only point (this
mean that n is only Ofor a very narrow interval ofV¡).
3/9
APPLICATION NOTE
Figure 4 : Complete Circuit with Current Feedback.
01
Figure 5 : Output Characteristics of the Circuit in
fig. 4.
+
04
{
VF $ 1.2 V@ 1= 2 A
vement shall the clockwise or counter-clockwise.
For the circuit implementation, the integrated circuits L291 (which includes a D/A converter and two
operational amplifiers) and L292 are used.
A simplified circuit diagram is shown in fig. 6.
-
Figure 6 : Simplified Circuit Diagram (digital
control).
ID '¡lVl
lnM. . . . . :rA.
·-SYSTEM WITH DIGITAL CONTROL
In this system the speed information is given to the
circuit by a binary code made up of 5 inforrnation bits
plus one sign bit, which determines whether the mo-
4/9
APPLICATION NOTE
where
The current value l1 dependson the value of lref and
on the val u e of inputs b1 through bs, where its sign
depends on the bs input.
=dynamo's voltage constant
nM =maximum speed presetforthe motor.
Kg
The maximum value for h, which is obtained whenever inputs b1 through bs are low, is :
h
max
31
= lref - - =
16
Vref
31
R1
16
The current lret, and consequentlythe ratio VreúR 1,
must lie within a certain range imposed by the D/A
converteractually used.
In our case, this range is ~.3 to 1 mA. The v~lues of
R 1 and R2 can be determmed from the prev1ous relationship. The same considerations made in the description of the DC control system apply for the
selection of R3.
In order to have the system in a steady state condition (no current drained by the motor), it must be:
h =- 12
By imposing the balance condition at the maximum
speed, one obtains: 11 max =- 12 max
V ref
31
R1
16
Figure 7 : Complete Circuit Diagram.
A complete diagram ofthe circuit implemented is indicated in fig. 7, while the input versus outputcharacteristics is shown in fig. 8.
Kg nM
R2
_,
•Ys
470KJ1
01
1111,
Dl
D--+-1
llllz
.,lr~-t
114
lis,·---
L292
L291
11
l!iiU\
D1 + D4
{
VF
$
1.2 V @ 1 = 2 A
5/9
APPLICATION NOTE
In the graph of fig. 8 the rotation speed of the motor
is represented on ordinates, while the decimal speed code, corresponding to the binary code applied
toinputsb1 throughbs, isrepresentedon abscissae.
circuit arrangement as schematically shown in fig. 9
has been adopted in order to have an output signa!
referred to ground, given an input signa! referred to
a referencevoltage (in L292) of approximately 8 V.
The abscissa 1 corresponds to the minimum speed
code, i.e. input b1 lowand remaining inputshigh, since the least significant input is b1 and the active status of inputs is low. The abscissa 31 corresponds to
the maximum speed code, i.e. all inputs b1 through
bslow. The negativeabscissae have been obtained
by changing the status of the bs input. The graph in
fig. 8shouldhave beenmadeup ofanumberofdots
; these dots have been joined together with an ininterrupted line for convenience. This graph has the
same features as the graph in fig. 3, i.e. the curve
featuresa discontinuityaround the origin, and it lowers as long as the motor current drain increases.
In this case too, the circuit in fig. 7 can be modified
in order to prevent that the speed vary in function of
the motor load, by adding a current loop in the control circuit, by using the remaining operational amplifier available in the integrated circuit L291.
Figure 9 : Translator Circuit.
Sin ce this amplifier has only the inverting input available, while the non-inverting input is grounded, a
Figure 8: OutputCharacteristic ofthe Circuit in
fig. 7.
IDO
tlm~IOOmA
Zlm=IA
6/9
"R'IIRI111
A
Klm!
R¡
Aa
B
o
YJt
Resistors RA and Rs must be high-precision resistors in orderto haveoutputO with no 1m currentpresent. In the practica! implementation, resitors with
an accuracy of 5 % are used and the ends of a potentiometer are interposed between resitors Rs and
the output to the su m point of the error amplifier is
made through the cursor. The gain of this current
loop is propotionalto the ratio R3/Rs. Acomplete circuit diagram is shown in fig. 1O.
Since, forreasonsofgain, resistor Rs must be27 kQ
and, if connected to pin 7 of L292, should ha ve subtracted too much current by thus affecting the correct operation of L292, it has been connected to
pin 11, having the same potential as pin 7. Consequently, the resistance value between pin 11 and
ground has been modified, in order to maintain the
switching frequency of L292 unchanged.ln orderto
have a correct adjustmentof potentiometerP1, it is
enough to set the Ospeed code (b1 through bs high)
and turn the cursor until the motor stops.
The input versus output characteristic obtained with
the circuit of fig. 1O is indicated in fig. 11.
APPLICATION NOTE
Figure 10: Complete Circuit with Current Feedback.
D1 + D4
Figure 11 : Output Characteristic of the Circuit in
fig. 10.
-IZ
-24
-11
-1
1162632
.......
{
Vr S 1.2 V @ 1
=2 A
RESPONSE TO INPUT STEP
Measurements have been taken on the circuits described in the previous paragraphs, in arder to analyze how the motor speed varies when a step
variation is imposed to the input.
For the system DC control, the control voltage has
been changed from Oto the maximum val ue V¡M and
down to O again. For the digital system the speed
code has been changed from O (b1 through bs high)
to the maximum value (b1 through bs low)and down
to O again. When the control quantity changes from
O to the maximum value, the output voltage of the
error amplifier (Vo, fig. 1 and fig. 6) assumes its maximum value, since the feed-back signal coming
from the tachometer dynamo initially O. In these conditions, L292 supplies the motor with the maximum
current (2A) and maintains it until the motor speed
is sufficiently clase to the maximum value.
Since the motor is powered from a constant current,
it moves with a constant current, it moves with a constant acceleration and consequently its speed
grows linearly from O up to the maximum val u e over
the time interval ta. The time needed for the motor
to reach the maximum speed also depends, bes id es
7/9
APPLICATION NOTE
the current, on the electrical and mechanical characteristics of the motor and on the moment of inertial
of the load applied to the motor. When the control
quantity changes from the maximum value toO, the
output of the error amplifier Vo assumes the maximum value, but with an opposite sign with respect
to the previous case, and the current flowing in the
motor is al so reversed and tends to brake it, by making the speed linearly decrease from the maximum
value down to Oover the time period tt. The no-load
characteristics, relevant to the motor used for the
previoustests, areshown in fig. 12. The timesta and
tt are not equal to each other, which circumstance
is basically dueto the frictions which, during the acceleration phase, oppose increase of speed, while
during the deceleration phase they contribute to
make the speed decrease. As a matter offact, from
the movement equation:
J
Figure 12 : Pulse Response.
V¡
O
n
e + D G+ Tt = Kr IM
where:
=
D =
Tt =
Kt =
J
System moment of inertia
Coefficient of viscous friction
Braking couple
Motor constant
é=
Angularspeed
e=
Angular acceleration
and by disregarding the term De, one obtains:
Error
Amp.
e=
KT · IM ± Tt
J
where from it can be seen that 1
is negative.
8/9
e 1 is greater if IM
ZO
loO
50
10 t(msecl
APPLICATION NOTE
lnformation furnished is believed lo be accurate and reliable. However, SGS-THOMSON Microelectronics assumes no responsibility for
!he consequences of use of such information nor for any infringement of patents or other righls of third parties which may result from its
use. No license is granted by implication or otherwise under any patent or patent rights of SGS-THOMSON Microelectronics. Specifications mentioned in this publication are subjecl lo change without notice. This publication supersedes and replaces all information previously supplied. SGS-THOMSON Microelectronics products are not authorized for use as criticar components in life support devices or
systems without express written approval of SGS-THOMSON Microelectronics.
© 1995 SGS-THOMSON Microelectronics- All Rights Reserved
SGS-THOMSON Microeleclronics GROUP OF COMPANIES
Australia - Brazil - France - Germany - Hong Kong - ltaly - Japan - Korea - Malaysia - Malta - Morocco - The Netherlands- Singapore Spaio - S~doo - Swi""'"'"' - Toiwoo - Tholiood - Uoijod Kiogd~- U.SA
~
9/9